Dťbattement vertical
|
Objectifs
|
Analyser le fonctionnement de la suspension et valider le critŤre de dťbattement.
|
|
CI abordťs
|
- CI 6.1 - Simulations mťcaniques.
- CI 6.2 - Interprťtation des rťsultats díune simulation.
- CI 7.2 - Analyse des mouvements.
|
|
Compte rendu
|
Compte rendu papier ŗ imprimer :  . .
|
|

|
1h50
|

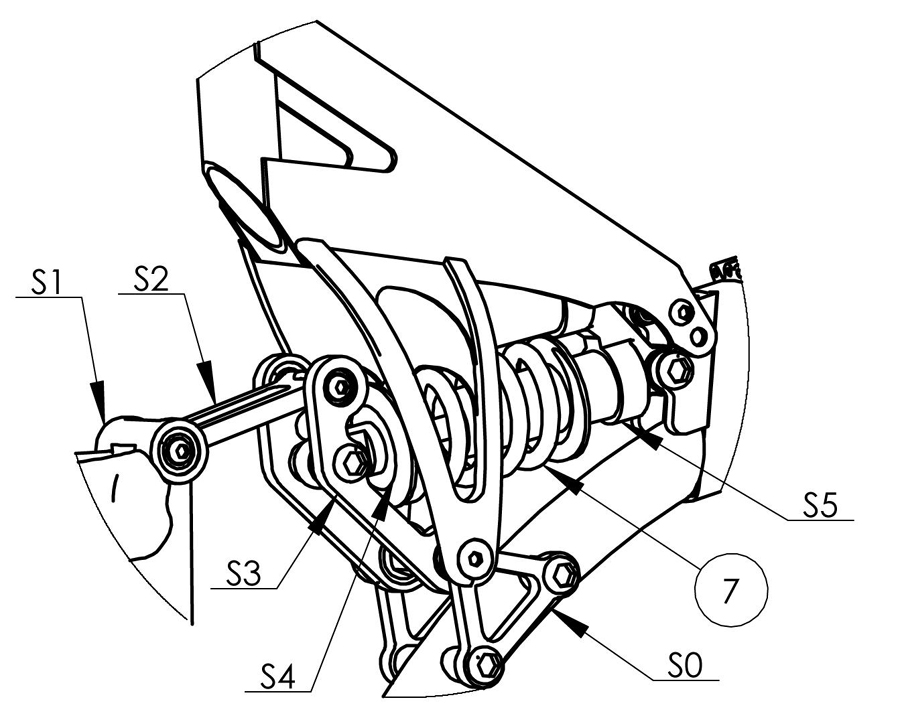
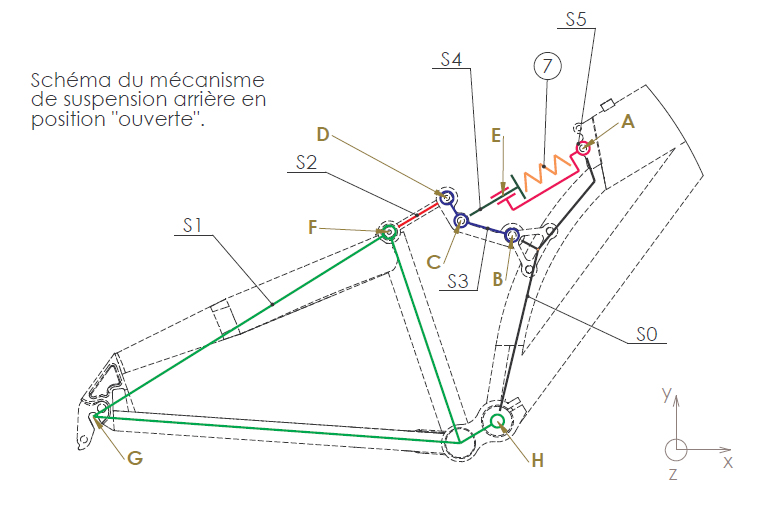
Le mťcanisme de suspension est modťlisť ci-dessous, on peut distinguer 5 classes díťquivalence cinťmatique : le cadre S0, le levier S3, la biellette S2, le bras oscillant S1, la partie tige S4 de líamortisseur et la partie corps S5 de líamortisseur. Le ressort 7 ťtant un solide dťformable, il níest pas rťpertoriť dans ce bilan.
Lorsquíun obstacle percute la roue arriŤre, celle-ci est projetťe vers le haut. Le bras oscillant S1 pivote autour de líaxe (H,z) de la liaison pivot, rťalisťe par 2 roulements ŗ contact radial, avec le cadre S0. La biellette S2, en liaison pivot díaxe (F,z) avec le bras oscillant, est entraÓnťe et pousse le levier S3 avec lequel elle a une liaison pivot díaxe (D,z).
Le levier S3 pivote alors autour de l'axe (B,z) de la liaison pivot avec le cadre S0. La partie tige S4 de líamortisseur, en liaison pivot díaxe (C,z) avec le levier S3, est poussťe par celui-ci et rentre dans la partie corps S5 de líamortisseur. S4 et S5 sont en liaison pivot glissant díaxe (E,x1).
Le dťplacement de la tige S4 de líamortisseur par rapport au corps S5 de l'amortisseur, lors de sa rentrťe, comprime le ressort 7, ce qui va permettre díemmagasiner líťnergie mťcanique et donc de freiner la montťe de la roue pour assurer le contact roue/sol.
1 - Dťtermination des mouvements et trajectoires���������� ���
= 30 min
Rťpondre aux questions sur le DR1 et effectuer les tracťs sur le DR2 qui reprťsente le VTT avec líamortisseur arriŤre dans sa position complŤtement
sortie.
Vous allez rťaliser une analyse gťomťtrique de la suspension afin de valider le critŤre de dťbattement. Vous devez vťrifier que la valeur de course de l'amortisseur permet d'obtenir le dťbattement minimum spťcifiť au cahier des charges.
 Question 1 - A l'aide des schťmas cinťmatiques ci-dessus, identifier le nom et l'axe des liaisons aux points A, B, C, D, E, F et H.
Question 1 - A l'aide des schťmas cinťmatiques ci-dessus, identifier le nom et l'axe des liaisons aux points A, B, C, D, E, F et H.
Question 2 - Dťfinir la nature du mouvement de S1/S0, dťfinir et tracer les trajectoires TF∈S1/S0 et TG∈S1/S0.
Question 3 - Dťfinir la nature du mouvement de S3/S0, dťfinir et tracer les trajectoires TC∈S3/S0 et TD∈S3/S0.
Question 4 - Dťfinir la nature du mouvement de S4/S5, dťfinir et tracer la trajectoire TC∈S4/S5.
2 - Dťbattement vertical
- la course de l'amortisseur,
- le dťbattement minimum du cahier des charges.
Question 6 - Convertir la course de l'amortisseur ŗ l'ťchelle du DR2.
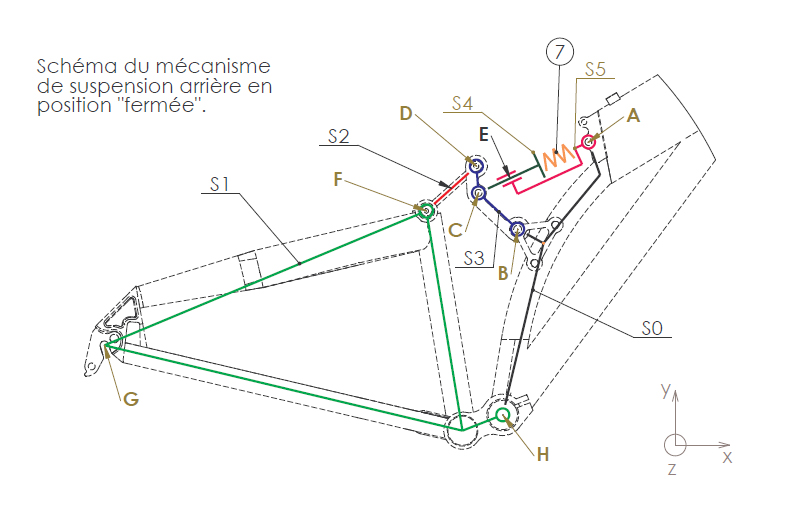
Question 7 - En tenant compte de la valeur calculťe ŗ la Question 6, reporter sur la trajectoire TC∈S3/S0 le point C, appelť Cí, lorsque l'amortisseur est
complŤtement rentrť.
Question 8 - Trouver alors la nouvelle position du point D, nommť Dí.
Question 9 - Rťaliser les tracťs nťcessaires afin de coter le dťbattement vertical du point G.
Question 10 - Conclure quant ŗ la validation du critŤre de dťbattement imposť par le cahier des
charges fonctionnel
3 - Validation sur modŤle 3D
= 20 min
 Tťlťcharger et dťzipper le dossier ci-dessous :
Tťlťcharger et dťzipper le dossier ci-dessous :

Ouvrir le fichier Etude-suspension.SLDASM.

 Attention ne changer pas la position de la suspension arriŤre pour ne pas influencer les rťsultats suivants. Sinon fermer le fichier sur SolidWorks sans enregistrer et l'ouvrir ŗ nouveau.
Attention ne changer pas la position de la suspension arriŤre pour ne pas influencer les rťsultats suivants. Sinon fermer le fichier sur SolidWorks sans enregistrer et l'ouvrir ŗ nouveau.
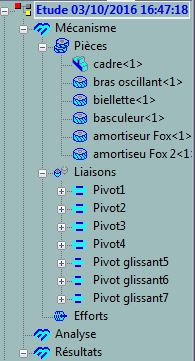
Cliquer sur l'onglet Meca3d au dessus de l'arborescence ŗ gauche.
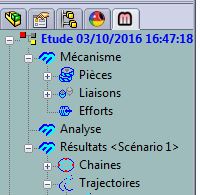
Faire un clic droit sur Mťcanisme puis Construction automatique,
le mťcanisme est construit de maniŤre automatique et les liaisons ont toutes ťtť crťes :
Dans l'arborescence de Meca3D, faire un clic droit sur Analyse puis Calcul mťcanique. Vous obtenez la fenÍtre de paramťtrage suivante :
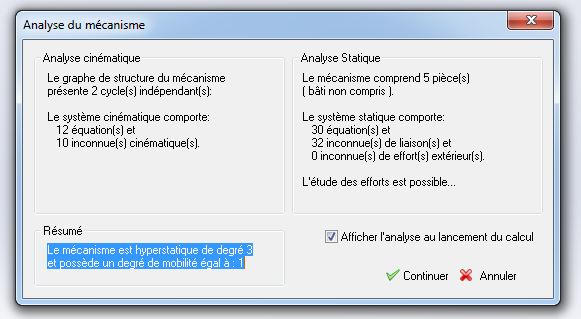
Lire les informations et cliquer sur Continuer. Vous obtenez ensuite la fenÍtre suivante :
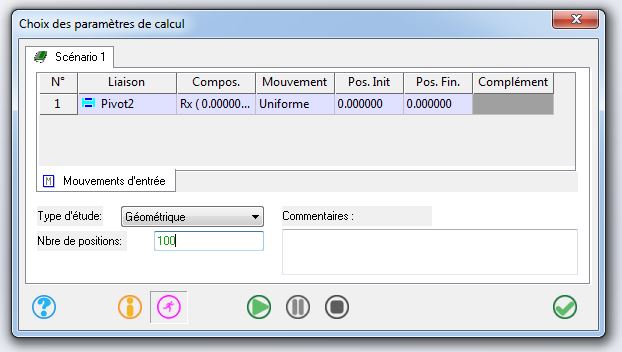
Paramťtrage de la simulation :
-
Type d'ťtude : choisir Gťomťtrique, cette ťtude nous permettra de visualiser la position des diffťrentes piŤces du mťcanisme lors du mouvement.
-
Nombre de position : 100.
-
Liaison : la liaison qui nous intťresse ici est celle qui concerne les deux classes d'ťquivalence cinťmatiques S4 et S5 qui composent l'amortisseur "fox", retrouver cette liaison dans la liste.
-
Composante : dans ce cas c'est le mouvement de translation qu'il faut sťlectionner.
-
Positions : laisser la position initiale ŗ 0 et indiquer la position finale de l'amortisseur correspondant ŗ la course. Attention les unitťs sont en mŤtres.
Une fois le paramťtrage correctement rťalisť, lancer le calcul  puis cliquer sur
puis cliquer sur  .
.
 Pour visualiser la simulation, faire un clic droit sur Rťsultats puis Simulation. Lancer la lecture.
Pour visualiser la simulation, faire un clic droit sur Rťsultats puis Simulation. Lancer la lecture.
Pour afficher une trajectoire particuliŤre afin de pouvoir exploiter les rťsultats de calculs, dans l'arborescence de Meca3D, faire un clic droit sur Trajectoire puis Ajouter.
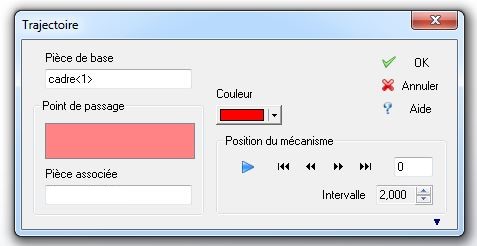
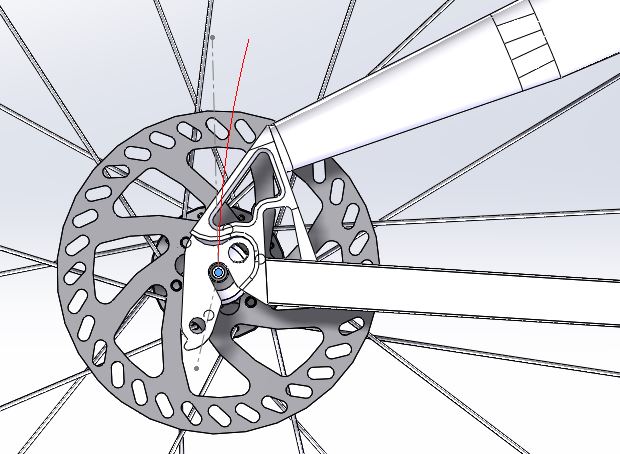
Cliquer sur un point correspondant au centre de la roue arriŤre dans la fenÍtre graphique de SolidWorks puis Ok.
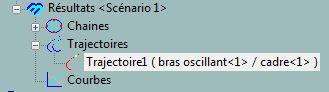
La trajectoire est crťťe dans l'arborescence, les rťsultats de l'ťtude sont disponibles par un clic droit dessus puis Consulter.
Question 11 - Relever les valeurs nťcessaires et calculer le dťbattement vertical. Est-ce en accord avec votre ťtude prťcťdente ?