VTT Vario Bomba
Influence des réglages
|
Objectifs
|
Observer par simulation et déterminer par calcul l'influence des réglages sur deux systčmes de freinage.
|
|
CI abordés
|
- CI 9.2 - Couple & moment : Notion de couple.
- CI 11.1 - Représentation d'un modčle comportemental.
- CI 11.2 - Paramétrage : Paramétrage associé aux progiciels de simulation.
- CI 11.3 - Analyse des résultats de simulation.
|
|
Compte rendu
|
Informatique sous OpenOffice. Vous accorderez le plus grand soin ŕ la présentation de votre compte rendu.
|
|

|
1h50
|
Le VTT Vario Bomba peut ętre équipé de deux systčmes de freinage différents selon le souhait de l'acheteur.
|
Le systčme CANTILEVER étudié dans la partie précédente
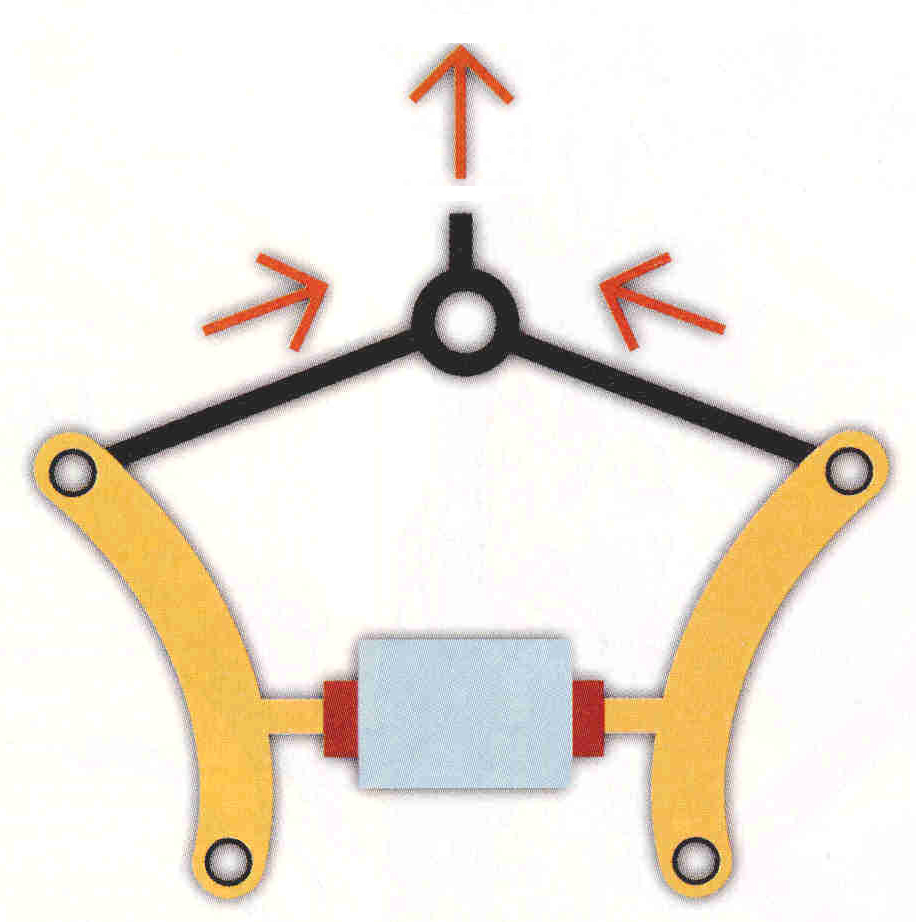
Dans un systčme Cantilever, la force initiale sur le câble est divisée par deux de façon égale sur les deux mâchoires.
|
Le systčme V-BRAKE objet de cette étude
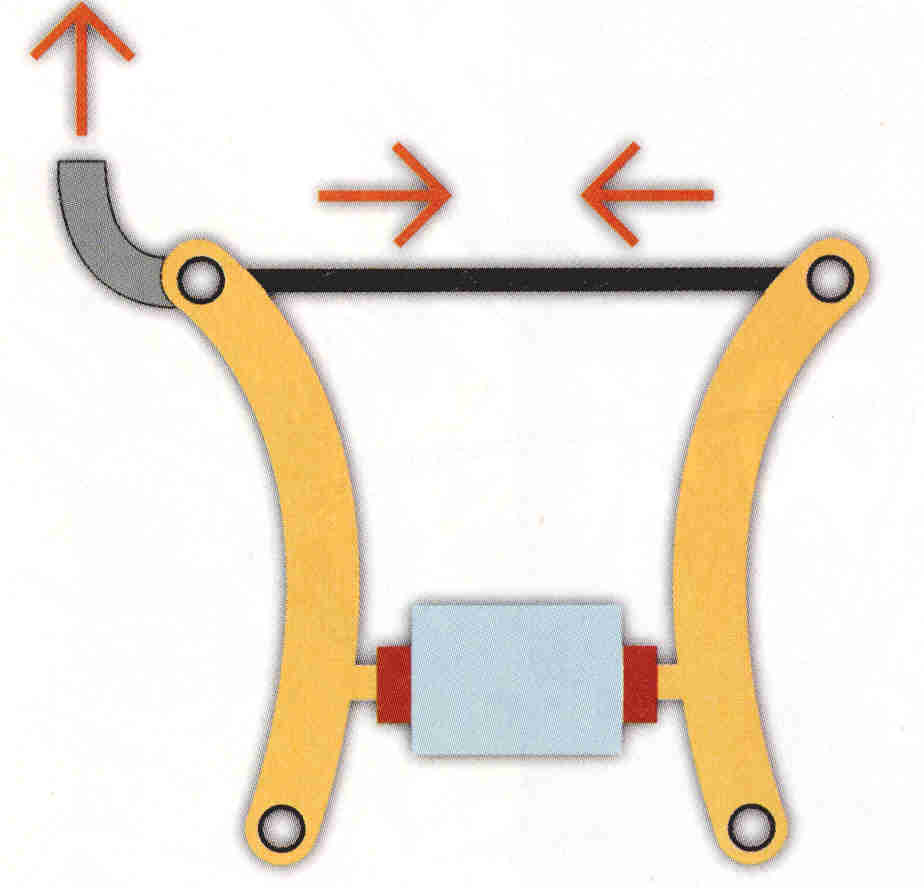
Dans un systčme ŕ tirage latéral comme le V-Brake, la force de traction appliquée sur le câble se répercute positivement ŕ un des étriers et négativement ŕ l'autre.
|
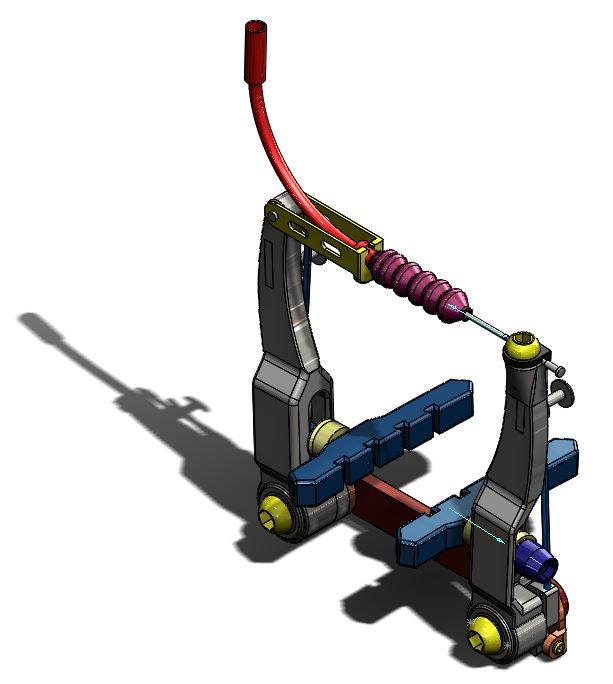
On se propose d'analyser l'influence, sur l'effort de pincement de la jante, du réglage de la position du patin dans le trou oblong du levier, pour deux freins de męme génération :
- V-Brake TEKTRO
- V-Brake SHIMANO XT
Télécharger et dézipper l'ensemble du dossier ci-dessous. Il contient les modčles SolidWorks des deux systčmes de freinage.

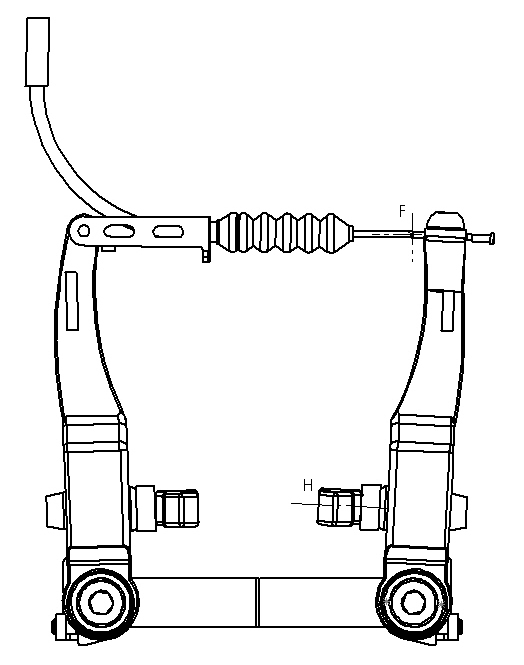
Afin de pouvoir réaliser une comparaison avec l'étude du systčme Cantilever, nous appliquerons un effort dans le câble de 125 N. Il faut donc déterminer l'effort de pincement des deux étriers V-Brake au point H
ŕ l'aide du logiciel de calcul Meca3d.
1 - V-Brake TEKTRO
= 80 min
Simulation
 Ouvrir le fichier TEKTRO-réglable.SLDASM présent dans le dossier Frein_VTT_Tektro.
Ouvrir le fichier TEKTRO-réglable.SLDASM présent dans le dossier Frein_VTT_Tektro.
Cliquer sur l'onglet Meca3d au dessus de l'arborescence ŕ gauche.
Dans l'arborescence de Meca3D, faire un clic droit sur Analyse puis Calcul mécanique. Vous obtenez la fenętre de paramétrage suivante :
Lire les informations et cliquer sur Continuer. Vous obtenez ensuite la fenętre suivante :
Le paramétrage de la simulation est déjŕ réalisé. Lancer le calcul  puis cliquer sur
puis cliquer sur  .
.
Dans l'arborescence de Meca3D, faire un clic droit sur Résultats puis Simulation. Vous obtenez la fenętre suivante en cliquant sur le petit triangle vers le bas
Afficher les options :
Vous pouvez ralentir la vitesse et relancer l'animation du freinage.
Fermer ensuite cette fenętre.
 Question 1.1 - En observant la simulation, décrire le mouvement du patin par rapport ŕ un référentiel fixe.
Question 1.1 - En observant la simulation, décrire le mouvement du patin par rapport ŕ un référentiel fixe.
Réglages
Pour modifier les réglages des 2 patins ŕ la fois, changer la variable hauteur dans le menu Outils > Equations.
A titre d’essai, entrer la valeur 1 mm (Position basse), puis 20 mm (Position haute) et observer les modifications sur l'assemblage.
Pour la suite on repčre trois positions :
-
Position 1 = 1 mm
-
Position 2 = 8 mm
-
Position 3 = 20 mm
Placer le réglage en Position 1.
 Attention aprčs chaque modification de réglage, l'étape Simulation avec le Calcul mécanique doit ętre refait.
Attention aprčs chaque modification de réglage, l'étape Simulation avec le Calcul mécanique doit ętre refait.
Résultats
Refaire le Calcul mécanique puis dans l'arborescence de Meca3D, dérouler les Efforts.
Deux efforts sont paramétrés :
-
au point F, l'effort connu au niveau du câble,
-
au point H, l'effort inconnu au niveau du patin. Cet effort inconnu représente l'effort de pincement.
Faire un clic droit sur Effort connu (levier) puis Résultats. Vous obtenez la fenętre suivante :
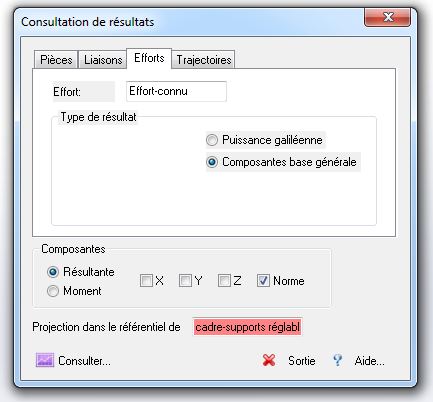
L'onglet Efforts doit ętre selectionné, puis cliquer sur Résultante et décocher X, Y et Z. Puis  .
.
Pour les question suivantes, vous présenterez les résultats de la simulation sous la forme d'un tableau dans votre compte rendu informatique :
|
Effort
|
Réglages
|
|
Position 1
|
Position 2
|
Position 3
|
|
Au point F
|
|
|
Au point H (t = 0s)
|
|
|
|
|
Au point H (t = 10s)
|
|
|
|
|
Au point H (max)
|
|
|
|
Question 1.2 - Relever l'intensité de l'effort au point F et compléter le tableau.
De la męme maničre, faire un clic droit sur Effort inconnu (patin) puis Résultats.
Question 1.3 - Relever l'intensité de l'effort au point H pour t = 0 s, pour t = 10 s puis l'intensité maximale et compléter le tableau pour la Position 1.
Question 1.4 - Modifier les réglages, et faites les relevés pour les Position 2 et Position 3.
Question 1.5 - Calculer l'efficacité du freinage maximale du systčme V-Brake TEKTRO et la comparer avec celle du systčme Cantilever (demander le compte rendu de l'étude précédente). On rappelle que l'efficacité du freinage se détermine par le rapport entre l'effort de pincement (au niveau de la jante) et l'effort de l'utilisateur (60 N dans cette étude, mesuré au niveau de la poignée).
Question 1.6 - Quel est l'influence du réglage sur l'effort de pincement ? Quelle position faut-il adopter pour une meilleure efficacité ?
Calculs
Le principe fondamental de la statique s'applique aussi pour les moments (ou couple) appliqués ŕ une pičce. La somme des couples en un point est égale ŕ zéro.
C'est ce que nous allons vérifier pour la position 1 ŕ t = 0s au point K centre de rotation du levier.
Le couple C en N.m se définit par le produit entre l'effort F et la distance D perpendiculaire entre le point d'application de la force (ici F puis H) et le centre de la rotation (ici K).
-
C : couple en N.m,
-
D : distance en m,
-
F : force en N.
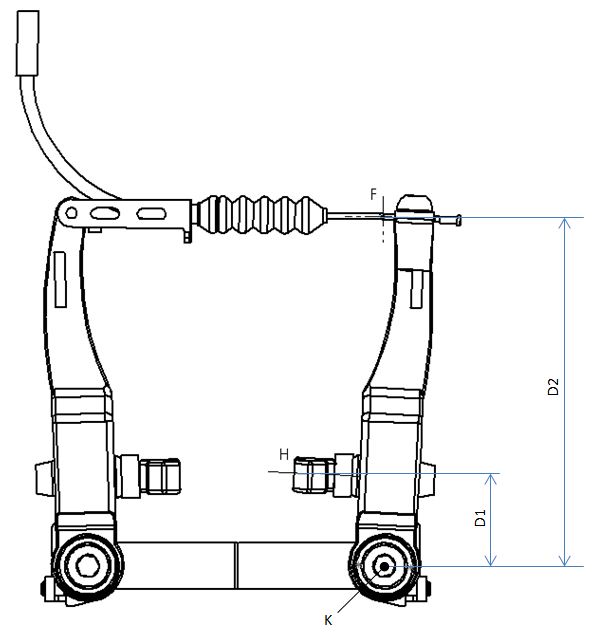
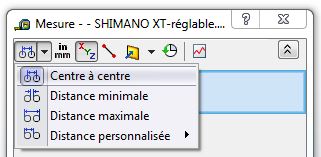
Sur le modčle SolidWorks, mesurer les distances D1 et D2 avec l'outil Mesures  (menu Outil). Vérifier que la mesure soit Centre ŕ centre :
(menu Outil). Vérifier que la mesure soit Centre ŕ centre :
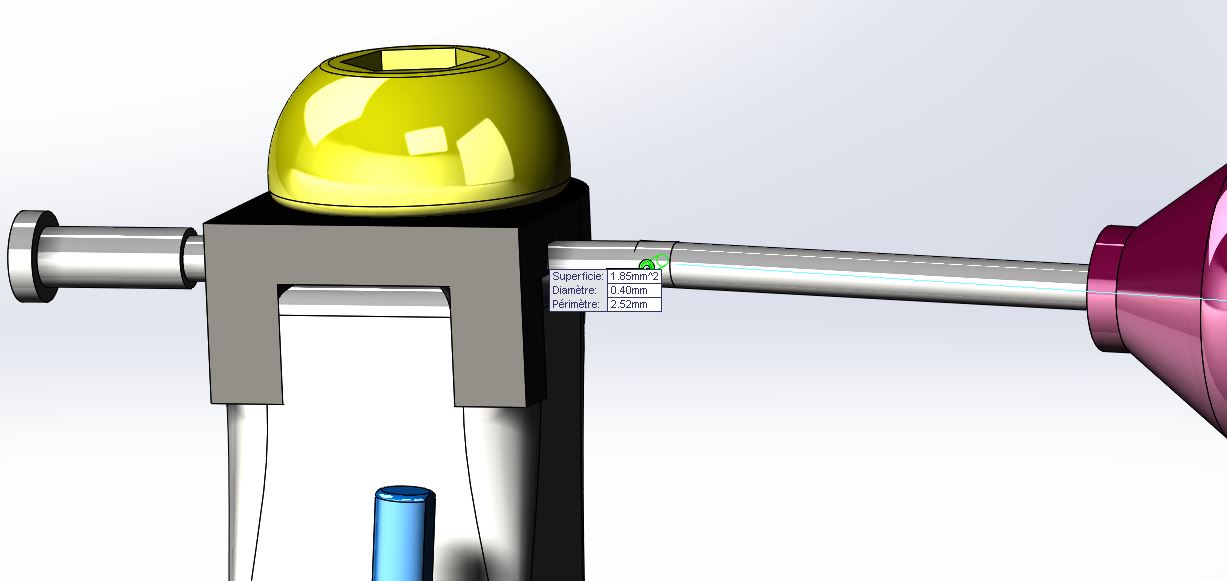
Pour le point F, sélectionner la surface cylindrique du perçage sur le câble :
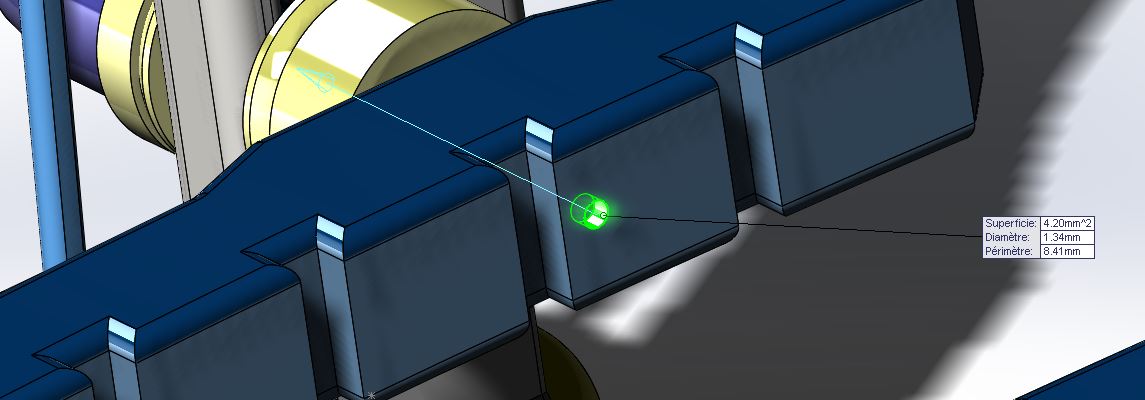
Pour le point H, sélectionner la surface cylindrique du perçage sur le patin :
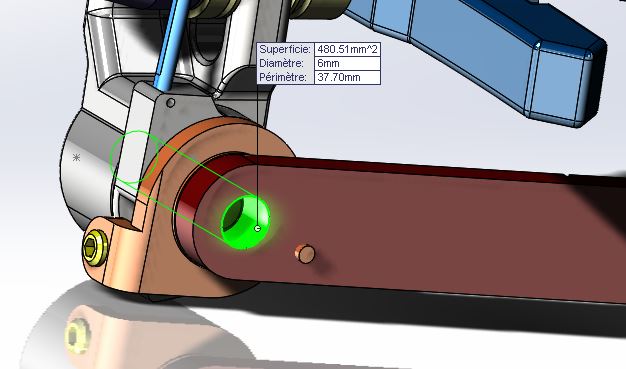
Pour le point K, sélectionner la surface cylindrique du perçage sur le cadre support :
Pour ętre sűr de mesurer les bonnes distances sur le modčle SolidWorks, il est conseillé de fermer le fichier sans enregistrer puis l'ouvrir ŕ nouveau. On veillera ŕ bien remettre le patin en position 1.
Question 1.7 - Relever les distances verticales (suivant l'axe Y) D1 et D2.
Question 1.8 - Calculer le couple créé au point K par la force en F puis par la force en H ŕ t = 0s. Que constatez-vous ?
Question 1.9 - Si le couple créant un mouvement de rotation horaire est négatif et le couple créant un mouvement de rotation trigonométrique est positif, écrire la relation qui vérifie le principe fondamental de la statique appliqué aux couples.
2 - V-Brake SHIMANO
= 30 min
Simulation
Ouvrir le fichier SHIMANO XT-réglable.SLDASM présent dans le dossier Frein_VTT_Shimano.
Lancer le Calcul mécanique puis la simulation.
Question 2.1 - En observant la simulation, décrire le mouvement du patin par rapport ŕ un référentiel fixe. Comparer les deux systčmes V-Brake. Quel peut-ętre l'avantage du Shimano ?
Réglages
Sur ce frein quatre réglages sont disponibles :
-
Réglage 1 : Le patin droit peut coulisser dans le trou oblong.
-
Réglage 2 : La came inférieure droite peut tourner.
-
Réglage 3 : Le patin gauche peut coulisser dans le trou oblong.
-
Réglage 4 : La came inférieure gauche peut tourner.
Pour modifier les réglages des 2 patins ŕ la fois, changer les variables hauteur et angle dans le menu Outils > Equations.
A titre d’essai, entrer les hauteurs 1 mm (Position basse), puis 28 mm (Position haute) et observer les modifications sur l'assemblage.
Pour la suite on repčre trois positions :
- Position 1 = 1 mm
- Position 2 = 12 mm
- Position 3 = 28 mm
Faire varier l'angle et observer ce qui se passe.
Question 2.2 - Décrire l'influence du réglage de l'angle et remettre l'angle ŕ 30 °.
Dans votre compte rendu informatique, vous présenterez les résultats de la simulation sous la forme d'un tableau :
|
Effort
|
Réglages
|
|
Position 1
|
Position 2
|
Position 3
|
|
Au point F
|
|
|
Au point H (t = 0s)
|
|
|
|
|
Au point H (t = 10s)
|
|
|
|
|
Au point H (max)
|
|
|
|
Question 2.3 - Calculer l'efficacité du freinage maximale du systčme V-Brake SHIMANO.
Question 2.4 - Quel constat pouvez-vous faire suite ŕ ces relevés de mesures ? Commenter.