Influence des rťglages
|
Objectifs
|
Observer par simulation et dťterminer par calcul l'influence des rťglages sur deux systŤmes de freinage.
|
|
Compťtences et savoirs ťvaluťs
|
- S2-2
- Comportement d'un mťcanisme et/ou d'une piŤce : Mouvements des mťcanismes.
-
CO8.1 - Paramťtrer un logiciel de simulation mťcanique pour obtenir les caractťristiques d'une loi d'entrťe/sortie d'un mťcanisme simple.
-
CO8.2 - Interprťter les rťsultats d'une simulation mťcanique pour valider une solution ou modifier une piŤce ou un mťcanisme.
|
|
Compte rendu
|
Compte rendu informatique. Vous accorderez le plus grand soin ŗ la prťsentation.
|
|

|
1h50
|
Le VTT Vario Bomba peut Ítre ťquipť de deux systŤmes de freinage diffťrents selon le souhait de l'acheteur.
|
Le systŤme CANTILEVER ťtudiť dans la partie prťcťdente
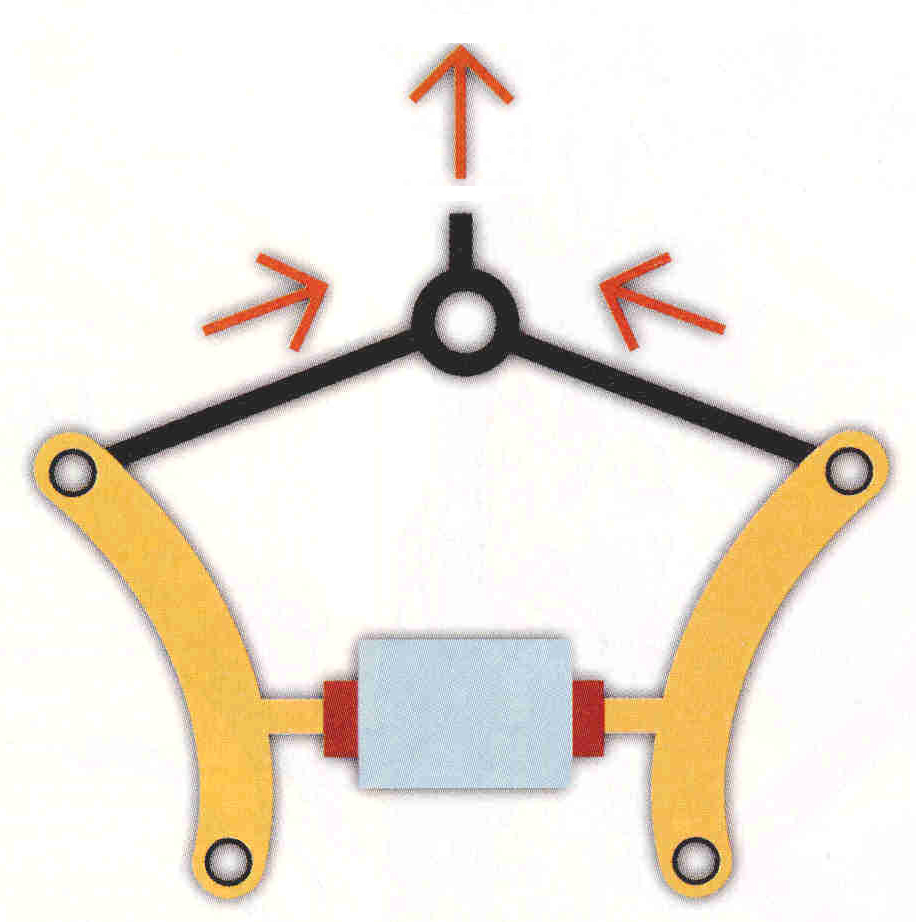
Dans un systŤme Cantilever, la force initiale sur le c‚ble est divisťe par deux de faÁon ťgale sur les deux m‚choires.
|
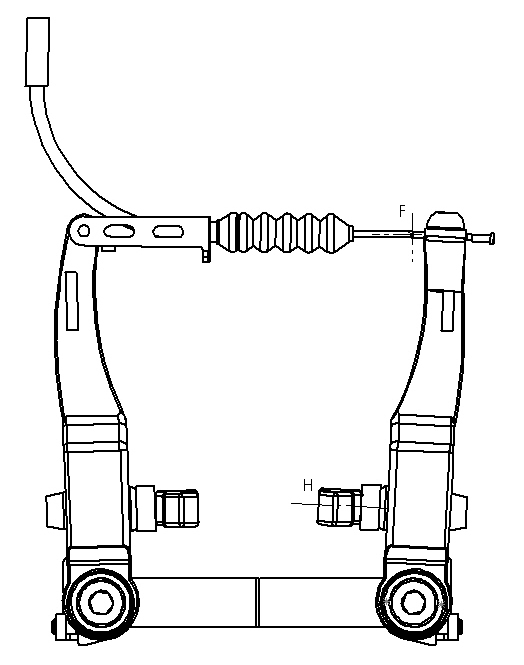
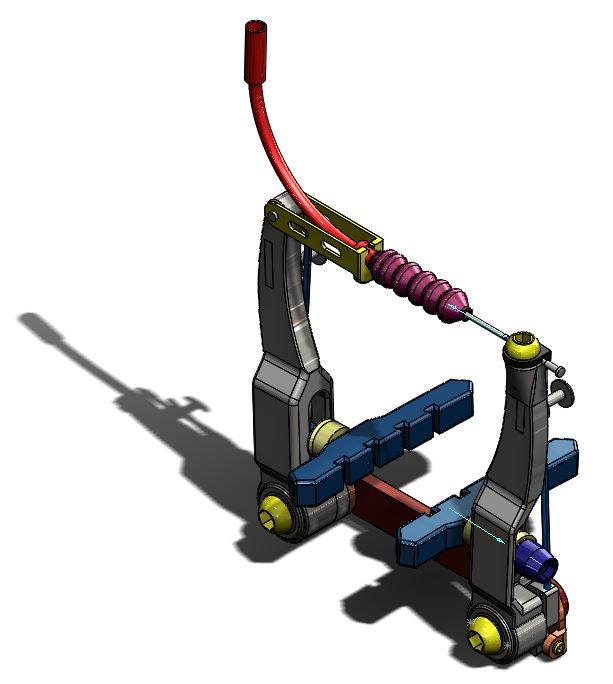
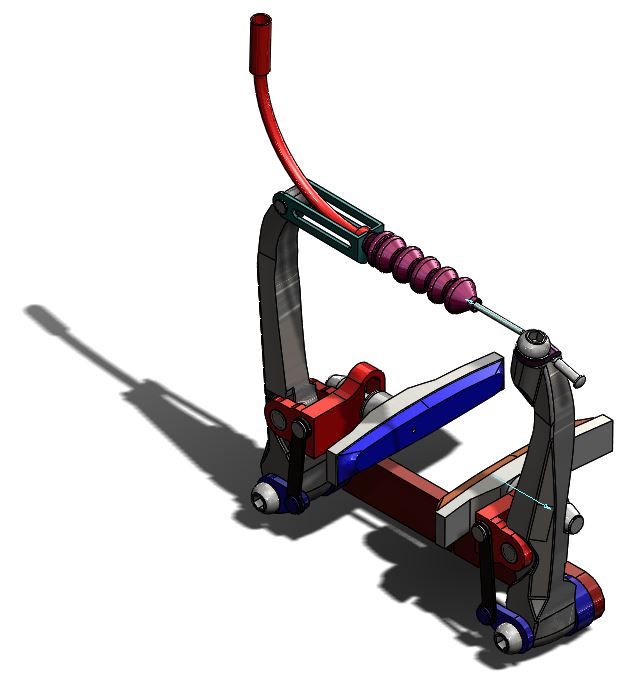
Le systŤme V-BRAKE objet de cette ťtude
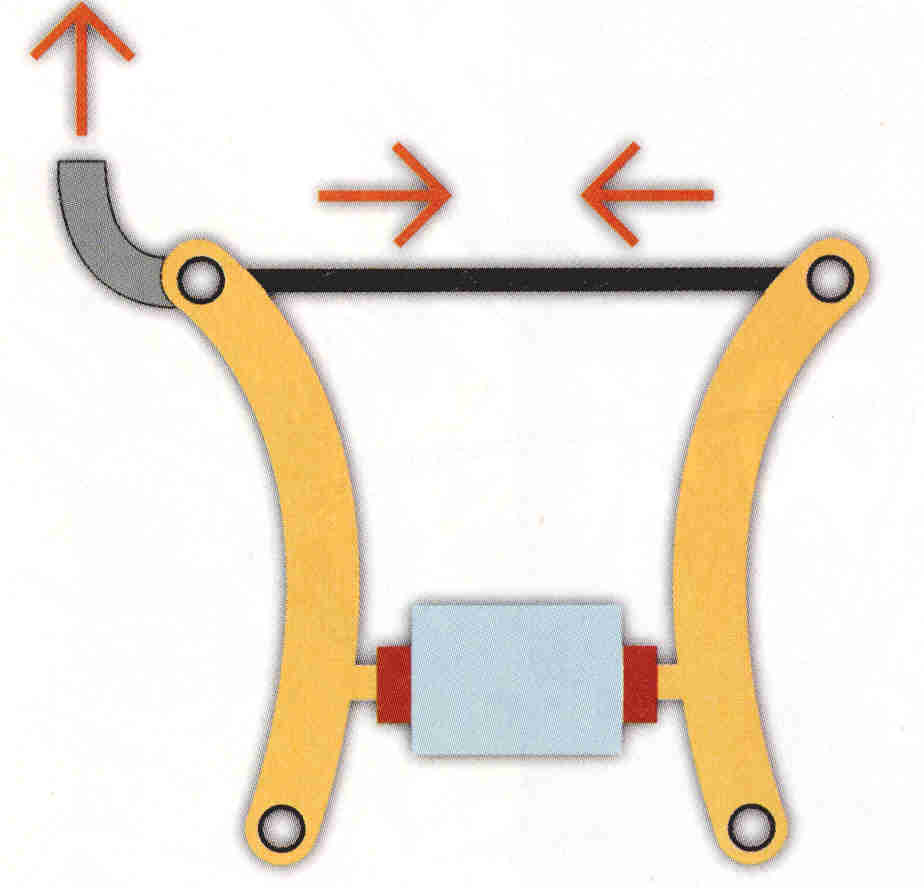
Dans un systŤme ŗ tirage latťral comme le V-Brake, la force de traction appliquťe sur le c‚ble se rťpercute positivement ŗ un des ťtriers et nťgativement ŗ l'autre.
|
On se propose d'analyser l'influence, sur l'effort de pincement de la jante, du rťglage de la position du patin dans le trou oblong du levier, pour deux freins de mÍme gťnťration :
- V-Brake TEKTRO
- V-Brake SHIMANO XT
Tťlťcharger et dťzipper l'ensemble du dossier ci-dessous. Il contient les modŤles SolidWorks des deux systŤmes de freinage.

Afin de pouvoir rťaliser une comparaison, nous appliquerons le mÍme effort de 125 N dans le c‚blede traction pour les deux systŤmes. Il faut donc dťterminer l'effort de pincement des deux ťtriers V-Brake au point H
ŗ l'aide du logiciel de calcul Meca3d.
1 - V-Brake TEKTRO
= 80 min
Simulation
 Avec SolidWorks 2016, ouvrir le fichier TEKTRO-rťglable.SLDASM prťsent dans le dossier Frein_VTT_Tektro.
Avec SolidWorks 2016, ouvrir le fichier TEKTRO-rťglable.SLDASM prťsent dans le dossier Frein_VTT_Tektro.
Cliquer sur l'onglet Meca3d au dessus de l'arborescence ŗ gauche.
Si l'onglet Meca3d n'est pas prťsent, allez dans le menu supťrieur Outils/Complťments et cochez de chaque cotť de Meca3d tout en bas. Il faudra fermer et rťouvrir votre assemblage.
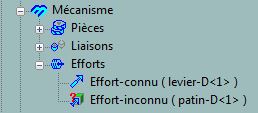
Dans l'arborescence de Meca3D, faire un clic droit sur Efforts puis Ajouter. Nous allons mettre en place :
- au point F, l'effort connu au niveau du c‚ble,
- au point H, l'effort inconnu au niveau du patin. Cet effort inconnu reprťsente l'effort de pincement.
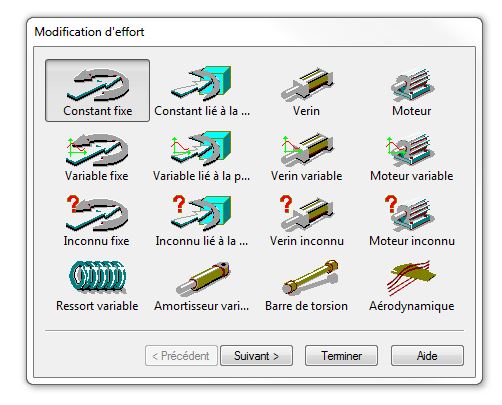
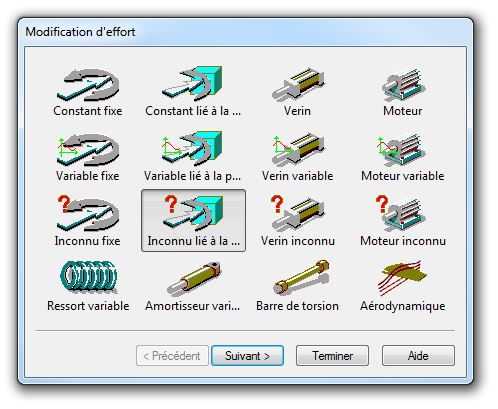
Sťlectionner un effort constant et fixe, puis Suivant :
Nommer cet effort "Effort connu" et sťlectionner la piŤce levier soit en cliquant dans l'arborescence ou directement sur la piŤce.
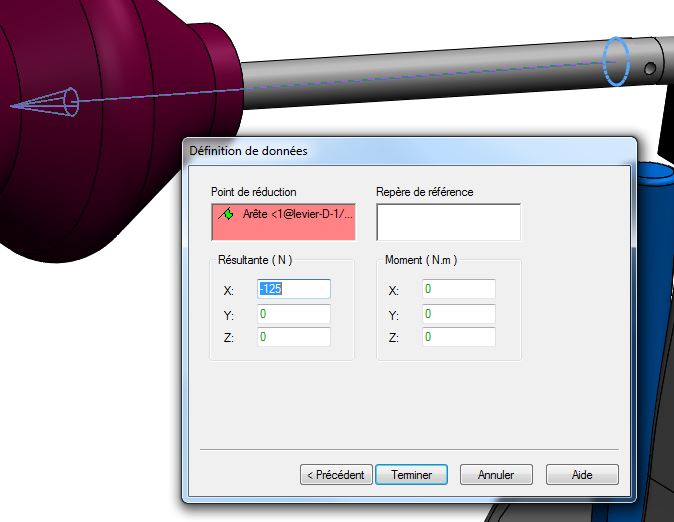
Selectionner l'arÍte du levier d'aprŤs l'image ci-dessous et indiquer l'intensitť de 125 N suivant l'axe X avec le bon sens. Puis Valider.
Sťlectionner maintenant un effort inconnu liť ŗ la piŤce, puis Suivant :
Nommer cet effort "Effort inconnu" et sťlectionner la piŤce Patin soit en cliquant dans l'arborescence ou directement sur la piŤce.
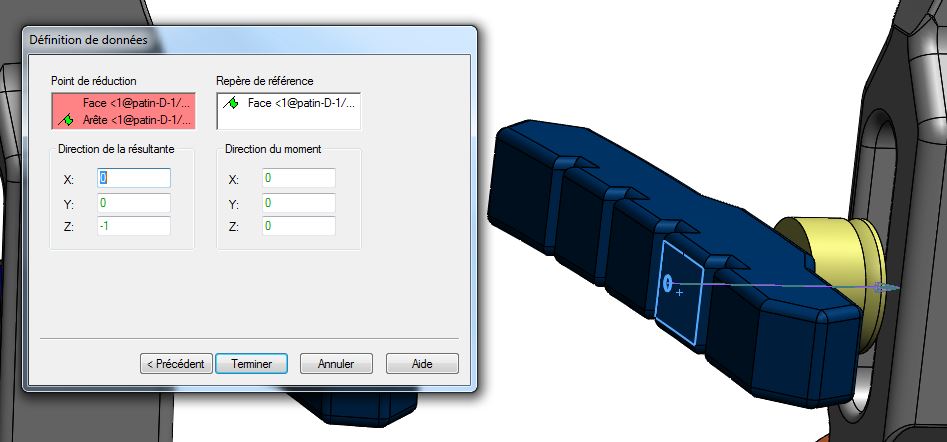
Selectionner l'arÍte du patin d'aprŤs l'image ci-dessous et indiquer la direction suivant l'axe Z avec le bon sens pour cette force. Puis Valider.
Dans l'arborescence de Meca3D, faire un clic droit sur Analyse puis Calcul mťcanique. Vous obtenez la fenÍtre de paramťtrage suivante :
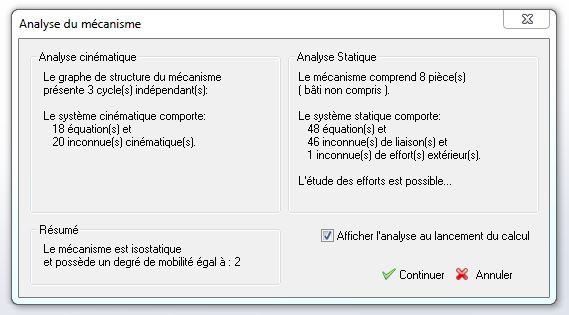
Lire les informations et cliquer sur Continuer. Vous obtenez ensuite la fenÍtre suivante :
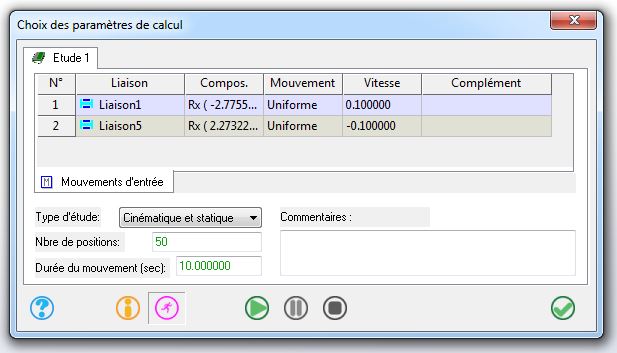
Le paramťtrage de la simulation est dťjŗ rťalisť. Lancer le calcul  puis cliquer sur
puis cliquer sur  .
.
Dans l'arborescence de Meca3D, faire un clic droit sur Rťsultats puis Simulation. Vous obtenez la fenÍtre suivante en cliquant sur le petit triangle vers le bas
Afficher les options :
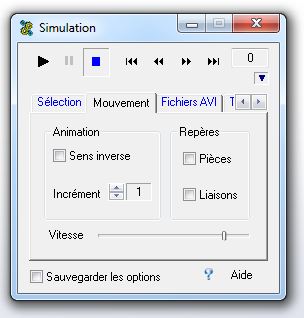
Vous pouvez ralentir la vitesse et relancer l'animation du freinage.
 Question 1.1 - En observant la simulation, quel est le mouvement :
Question 1.1 - En observant la simulation, quel est le mouvement :
- du levier par rapport au cadre fixe,
- du patin par rapport au cadre fixe.
Rťglages
Pour modifier les rťglages, revenir dans l'arborescence de l'assemblage avec l'onglet ŗ gauche :
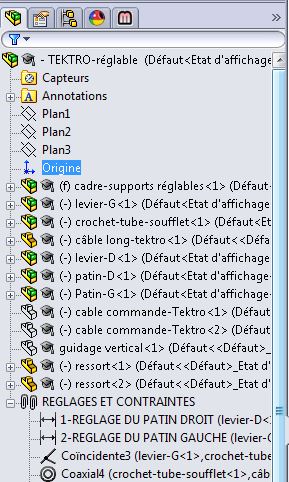
Se placer dans líarbre de construction et dťrouler le champ REGLAGES ET CONTRAINTES
en cliquant sur +, vous voyez apparaÓtre ces deux rťglages, en haut de cette fonction.
Faire un clic droit sur REGLAGE DU PATIN DROIT puis Editer la fonction :
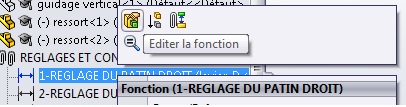
Vous devez lire  correspondant au rťglage actuel. A titre díessai, entrer la valeur 1 mm (Position basse), puis 20 mm (Position haute) et observer les modifications sur l'assemblage.
correspondant au rťglage actuel. A titre díessai, entrer la valeur 1 mm (Position basse), puis 20 mm (Position haute) et observer les modifications sur l'assemblage.
Pour la suite on repŤre trois positions :
-
Position 1 = 1 mm
-
Position 2 = 8 mm
-
Position 3 = 20 mm
Placer le rťglage en Position 1.
 Attention aprŤs chaque modification de rťglage, l'ťtape Simulation avec le Calcul mťcanique doit Ítre refait.
Attention aprŤs chaque modification de rťglage, l'ťtape Simulation avec le Calcul mťcanique doit Ítre refait.
Rťsultats
Refaire le Calcul mťcanique puis dans l'arborescence de Meca3D, dťrouler les Efforts.
Faire un clic droit sur Effort inconnu (patin) puis Rťsultats. Vous obtenez la fenÍtre suivante en cliquant sur le petit triangle vers le
bas
Afficher les options :
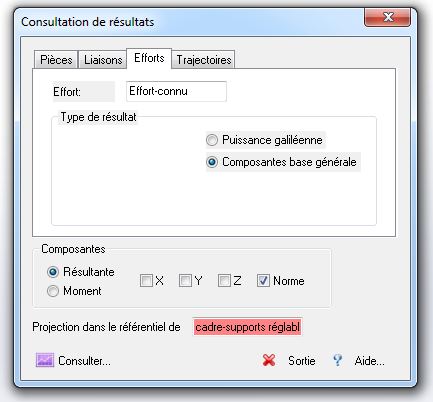
L'onglet Efforts doit Ítre selectionnť, puis cliquer sur Rťsultante et dťcocher X, Y et Z. Puis  .
.
Dans votre compte rendu informatique, vous prťsenterez les rťsultats de la simulation sous la forme d'un tableau :
|
Effort
|
Rťglages
|
|
Position 1
|
Position 2
|
Position 3
|
|
Au point F
|
|
|
Au point H (t = 0s)
|
|
|
|
|
Au point Hmax
|
|
|
|
Question 1.2 - Relever l'intensitť de l'effort au point F et complťter le tableau.
De la mÍme maniŤre, faire un clic droit sur Effort inconnu (patin) puis Rťsultats.
Question 1.3 - Relever l'intensitť de l'effort au point H pour t = 0 s puis l'intensitť maximal et complťter le tableau pour la Position 1.
Question 1.4 - Modifier les rťglages, et faites les relevťs pour les Position 2 et Position 3.
Rappel :
-
L'efficacitť du freinage se dťtermine par le rapport entre l'effort de
pincement sur l'effort de l'utilisateur au niveau de la poignťe. Il est
jugť efficace ŗ partir d'un rapport de 2.
-
L'effort de l'utilisateur au niveau de la poignťe est de 60N.
-
L'efficacitť du systŤme Cantilever est d'environ 3.
Question 1.5 - Calculer l'efficacitť du freinage pour chaque position avec Hmax en ajoutant un ligne ŗ votre tableau.
Question 1.6 - Comparer l'efficacitť du systŤme V-Brake TEKTRO avec celle du systŤme Cantilever.
Question 1.7 - Quelle est l'influence du rťglage sur l'effort de pincement ? Quelle position faut-il adopter pour une meilleure efficacitť ?
Calculs
Le principe fondamental de la statique s'applique aussi pour les moments (ou couple) appliquťs ŗ une piŤce. La somme des couples en un point est ťgale ŗ zťro. C'est ce que nous allons vťrifier pour la position 1 ŗ t = 0s au point K centre de rotation du levier.
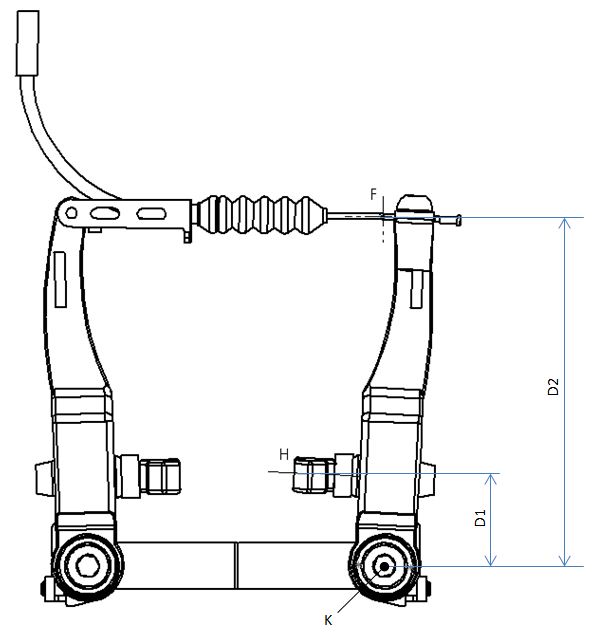
Le couple C en N.m se dťfinit par le produit entre l'effort et la distance perpendiculaire entre le point d'application de la force (ici F puis H) et le centre de la rotation (ici K).
-
C : couple en N.m,
-
D : distance en m,
-
F : force en N.
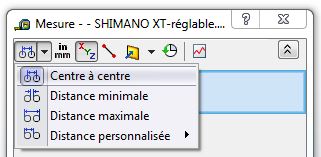
Sur le modŤle SolidWorks, mesurer les distances D1 et D2 avec l'outil Mesures  (menu Outil). Vťrifier que la mesure soit Centre ŗ centre :
(menu Outil). Vťrifier que la mesure soit Centre ŗ centre :
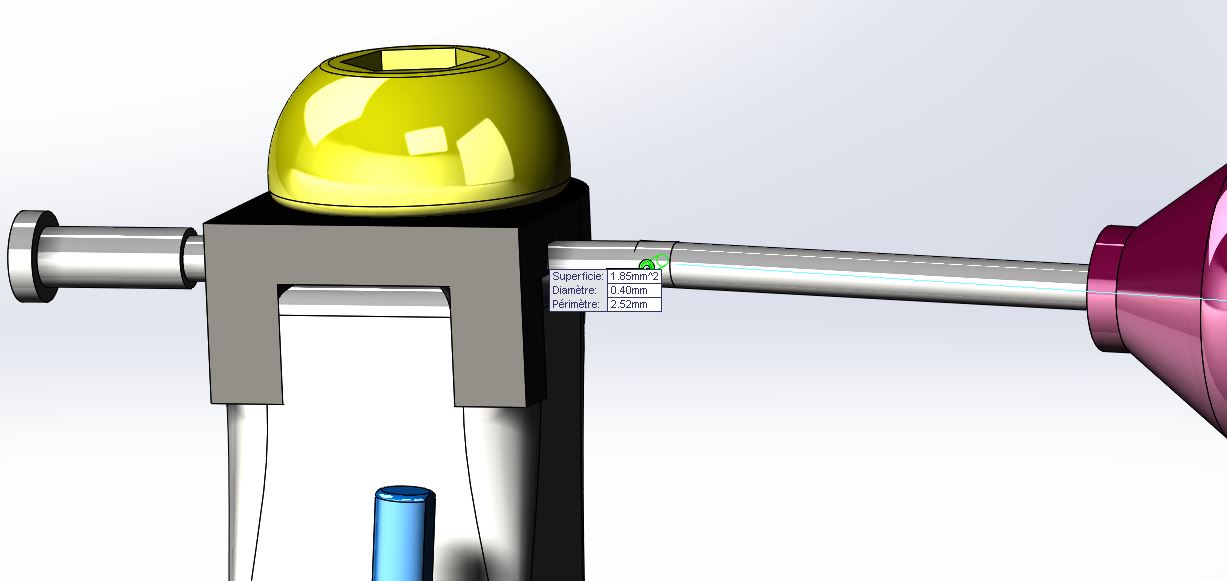
Pour le point F, sťlectionner la surface cylindrique du perÁage sur le c‚ble :
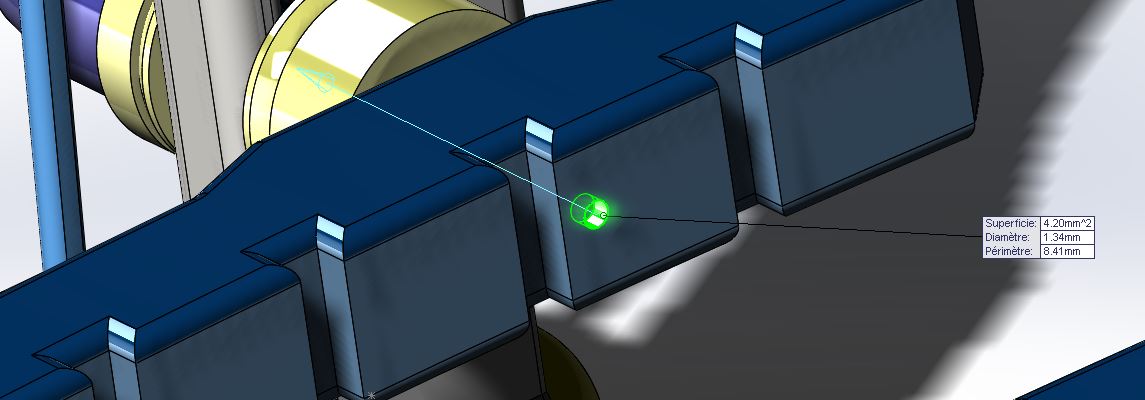
Pour le point H, sťlectionner la surface cylindrique du perÁage sur le patin :
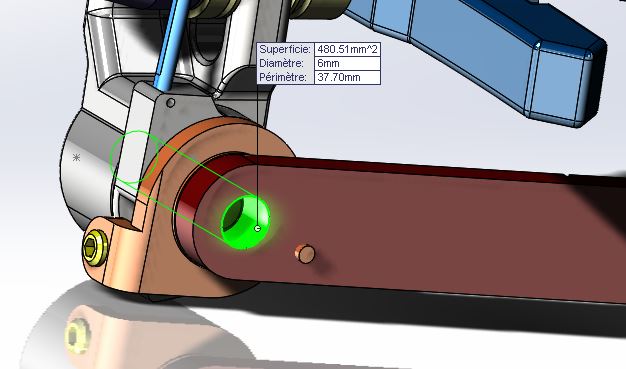
Pour le point K, sťlectionner la surface cylindrique du perÁage sur le cadre support :
Question 1.8 - Relever les distances verticales (suivant l'axe Y) D1 et D2.
Question 1.9 - Calculer le couple crťťe au point K par la force F puis par la force H ŗ t = 0s. Que constatez-vous ?
Question 1.10 - Si le couple crťant un mouvement de rotation horaire est nťgatif et le couple crťant un mouvement de rotation trigonomťtrique est positif, ťcrire la relation qui vťrifie le principe fondamental de la statique appliquť aux couples.
2 - V-Brake SHIMANO
= 30 min
Simulation
Ouvrir le fichier SHIMANO XT-rťglable.SLDASM prťsent dans le dossier Frein_VTT_Shimano.
Lancer le Calcul mťcanique puis la simulation.
Question 2.1 - En observant la simulation, quel est les mouvements :
- du levier par rapport au cadre fixe,
- du patin par rapport au cadre fixe.
Question 2.2 - Comparer les deux mouvements du patin des systŤmes V-Brake. Quel peut-Ítre l'avantage du Shimano ?
Rťglages
Sur ce frein quatre rťglages sont disponibles :
-
Rťglage 1 : Le patin droit peut coulisser dans le trou oblong.
-
Rťglage 2 : La came infťrieure droite peut tourner.
-
Rťglage 3 : Le patin gauche peut coulisser dans le trou oblong.
-
Rťglage 4 : La came infťrieure gauche peut tourner.
Pour modifier les rťglages, revenir dans l'arborescence de l'assemblage avec l'onglet ŗ gauche et faire un clic droit sur REGLAGE DU PATIN DROIT puis Editer la fonction.
Vous devez lire  correspondant au rťglage actuel. A titre díessai, entrer la valeur 1 mm (Position basse), puis 28 mm (Position haute) et observer les modifications sur l'assemblage.
correspondant au rťglage actuel. A titre díessai, entrer la valeur 1 mm (Position basse), puis 28 mm (Position haute) et observer les modifications sur l'assemblage.
Pour la suite on repŤre trois positions :
- Position 1 = 1 mm
- Position 2 = 12 mm
- Position 3 = 28 mm
Faire un clic droit sur REGLAGE ANGLE CAME DROITE puis Editer la fonction.
Faire varier cet angle et observer ce qui se passe.
Question 2.3 - Dťcrire l'influence de ce rťglage et remettre l'angle ŗ 30 į.
Dans votre compte rendu informatique, vous prťsenterez les rťsultats de la simulation sous la forme d'un tableau :
|
Effort
|
Rťglages
|
|
Position 1
|
Position 2
|
Position 3
|
|
Au point F
|
|
|
Au point H (t = 0s)
|
|
|
|
|
Au point H (max)
|
|
|
|
Question 2.4 - Calculer l'efficacitť du freinage pour chaque position avec Hmax en ajoutant un ligne ŗ votre tableau.
Question 2.5 - Quel constat pouvez-vous faire suite ŗ ces relevťs de mesures concernant les efforts au point H et l'efficacitť du freinage ? Commenter.
 Imprimer votre compte rendu en double exemplaire recto verso.
Imprimer votre compte rendu en double exemplaire recto verso.