La modťlisation du robot de peinture sous SolidWorks est disponible dans le repťrtoire de la classe. Copier l'ensemble du dossier dans le rťpertoire de travail de l'ordinateur.
Il manque deux piŤces pour rťaliser l'assemblage de l'ensemble.
Etape 1 - ![]() Modťliser sous SolidWorks les deux piŤces manquantes ŗ partir des dessins de dťfinition ci-dessous.
Modťliser sous SolidWorks les deux piŤces manquantes ŗ partir des dessins de dťfinition ci-dessous.
|
Bielle (30) |
Fourche (26) |
Etape 2 - ![]() Assembages des classes d'ťquivalence.
Assembages des classes d'ťquivalence.
La premiŤre classe d'ťquivalence, le b‚ti A est donnťe dťjŗ assemblťe :
Vous devez rťaliser les autres classe d'ťquivalence. Pour cela, crťer un nouvel assemblage pour chaque classe et enregistrer vos assemblages :
Remarque : Dans le fonctionnement normal du systŤme les classes C, G et H sont en liaison encastrement, elles feront donc parti du mÍme assemblage.
Rappel : Pour assembler des piŤces, insťrer une piŤce et crťer des ![]() pour obtenir des liaisons encastrement (coaxialitť + coincidence et/ou perpendicularitť, parallťlisme).
pour obtenir des liaisons encastrement (coaxialitť + coincidence et/ou perpendicularitť, parallťlisme).
![]() Pensez ŗ sauvegarder rťguliŤrement vos assemblages dans le mÍme dossier que les piŤces.
Pensez ŗ sauvegarder rťguliŤrement vos assemblages dans le mÍme dossier que les piŤces.
Etape 3 - ![]() Assembage du robot de peinture.
Assembage du robot de peinture.
1. Crťer un nouvel assemblage et enregistrer-le en le nommant Robot de peinture.
2. Insťrer l'assemblage b‚ti A en premier, c'est la classe d'ťquivalence fixe. Filtrer les piŤces ŗ insťrer en sťlectionnant uniquement les assemblages :

3. Insťrer les autres assemblages crťer ŗ l'Etape 2.
4. Placer les bonnes contraintes afin d'obtenir les liaisons dťterminťes dans l'ťtude cinťmatique du systŤme.
Remarque : Si besoin pour une meilleure visibilitť, vous pouvez cacher temporairement une piŤce. Faites un clic droit sur la piŤce dans l'arboresence ou sur le modŤle et sťlectionner Cacher les composants :

Etape 4 - ![]() Rťaliser l'animation de votre assemblage.
Rťaliser l'animation de votre assemblage.
1. En bas de la zone de travail, sťlectionner l'onglet Analyse de mouvement. La partie ci-dessous doit s'ouvrir.

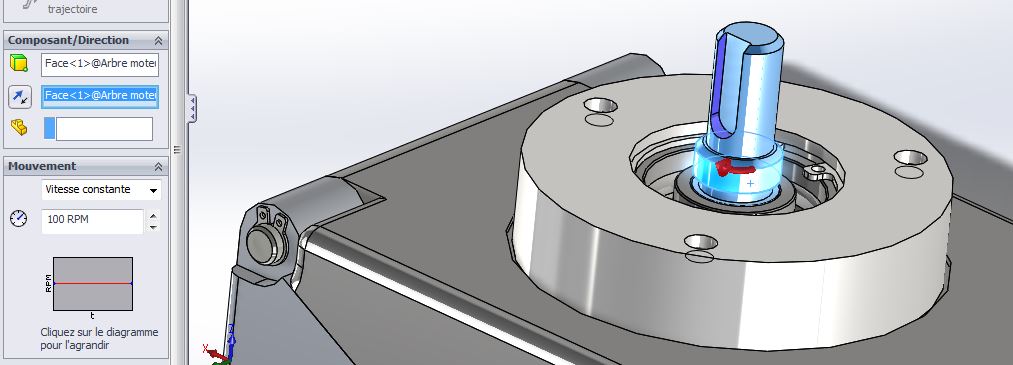
2. Ajouter un moteur ![]() pour crťer un mouvement de rotation continu en entrťe.
pour crťer un mouvement de rotation continu en entrťe.
3. Sťlectionner une surface cylindrique de l'arbre d'entrťe :
4. Lancer le calcul du mouvement ![]() .
.
5. Visualiser le rťsultat ![]() .
.