Robot Nao
Acquisitions & relevés
|
Objectifs
|
Prise en main du robot Nao & acquisition de mesures.
|
|
Compte
rendu
|
Informatique
sous OpenOffice. Vous accorderez le plus grand soin à la présentation de votre compte rendu.
|
|

|
1h50
|
Pour se déplacer, NAO effectue différents mouvements suivant 25 degrés de liberté. Dans cette activité, nous allons nous intéresser aux moteurs qui
permettent de mettre en mouvement ces degrés de liberté ainsi que les capteurs qui y sont
associés. Et plus particulièrement le moteur associé à l'épaule qui permet de lever le bras
gauche.
Les relevés de mesures que vous allez réaliser vous serviront pour la partie Couple
& déplacement.
Poser NAO sur le sol pendant tout le TP pour éviter qu'il ne tombe de la table.
1 - Utilisation du mode Motion
= 50 min
Démarrer NAO (bouton ventral). Attendre qu'il dise : "Ognac Nouk".
Lancer le logiciel Chorégraphe  (dans Menu Démarrer > Aldebaran Robotics).
(dans Menu Démarrer > Aldebaran Robotics).
Cliquer sur  , indiquer l'adresse
IP de NAO (NAO indique son adresse IP quand on appuie une fois sur son bouton ventral) et se connecter.
, indiquer l'adresse
IP de NAO (NAO indique son adresse IP quand on appuie une fois sur son bouton ventral) et se connecter.
Dans la partie droite de l'écran, le nao bleu (robot virtuel) doit devenir orange (robot réel).
Ouvrir la librairie Motion et cliquer sur le comportement
Stand Up
, le faire glisser jusqu'à la feuille centrale.
La cellule comporte 3 connexions, Start  , Stop
, Stop  qui sont des entrées (représentées à gauche de la boite) et une sortie
qui sont des entrées (représentées à gauche de la boite) et une sortie  fin du comportement (représentée
à droite de la boite).
fin du comportement (représentée
à droite de la boite).
La feuille possède une connexion liée au démarrage du comportement par l'icône . Relier la connexion à l'entrée Start de la boite
par un clic gauche sans relâcher puis lancer le comportement.
Lancer le comportement  : NAO se met debout.
: NAO se met debout.
Vous pouvez aussi essayer de le faire parler en utilisant un comportement Say (en anglais
uniquement).
Mettre NAO assis en utilisant un comportement
Sit Down.
Arrêter le comportement en cours en appuyant sur l'icône d'arrêt de comportement 
Dans Choregraphe, désactiver la commande des moteurs en cliquant sur l'icône  , jusqu'à ce qu'elle devienne rouge.
, jusqu'à ce qu'elle devienne rouge.
Créer une nouvelle boîte (clic droit
Create a new box
>
Timeline
) et compléter :
- Name : Ola,
- Description : Faire la Ola à NAO,
Relier la boite à la lecture.
Double cliquer sur la boîte Ola pour descendre d'un niveau. On voit apparaître le time line. Cliquer sur
le crayon de Motion :
Il apparaît alors une fenêtre TimeLine Editor que vous pouvez ouvrir en grand. Sur la
gauche les diverses parties du corps de NAO sont décrites. Cela correspond au comportement des moteurs.
Cliquer sur All de manière à dé-sélectionner toutes les parties, et sélectionner
LArm et RArm de manière à effectuer l'enregistrement des mouvements des bras uniquement.
Passer en Switch recording Mode dans la barre d'outil supérieur. Puis cliquer sur le point
gris devant Arm afin qu'il devienne rouge. Vous devez obtenir comme sur l'image ci-dessous.
 Attention lors de l'opération suivante il se peut que Nao tombe en arrière. Pour éviter cela,
le placer dos à un mur ou à un pilier de table.
Attention lors de l'opération suivante il se peut que Nao tombe en arrière. Pour éviter cela,
le placer dos à un mur ou à un pilier de table.
Dans le menu Record, sélectionner START  .
.
Saisir les 2 bras de NAO et les relever lentement jusqu'en haut puis les faire redescendre
lentement pour effectuer le geste de la Ola.
Pendant toute cette opération, il faut toucher en permanence les capteurs oranges situé sur le dos
des 2 mains de Nao.
Dans le menu Record, sélectionner STOP.
On voit apparaître dans l'axe des temps sur la droite les différents échantillons des positions
des bras.
Dans Choregraphe, réactiver la commande des moteurs en cliquant sur l'icône  , jusqu'à ce qu'elle devienne verte.
, jusqu'à ce qu'elle devienne verte.
Lancer le comportement enregistré et constater que NAO exécute la suite de gestes avec les temps d'arrêt s'il y en a
eu.
Revenir sur Timeline Editor. En cliquant sur l'icône courbe  on dispose de la courbe de commande des moteurs
permettant le mouvement.
on dispose de la courbe de commande des moteurs
permettant le mouvement.
On sélectionne la partie qui nous intéresse, ici Left Shoulder (ou LShoulderPitch)
et l'on voit apparaître la courbe de positionnement du bras gauche.
Vous pouvez retoucher les points de positionnement avec la souris sur les carrés afin de rendre
le mouvement plus fluide.
2 - Acquisition de la position avec Monitor
= 40
min
Lancer le logiciel Monitor (dans Menu Démarrer > Aldebaran Robotics).
Sélectionner le mode
Memory
et indiquer comme précédemment le robot NAO qu'on souhaite observer. Cliquer sur connecter.
Une nouvelle fenêtre s'ouvre, sélectionner nouvelle configuration.
Agrandir la fenêtre qui s'ouvre et cocher la case View device pour voir les données issues
des cartes électroniques.
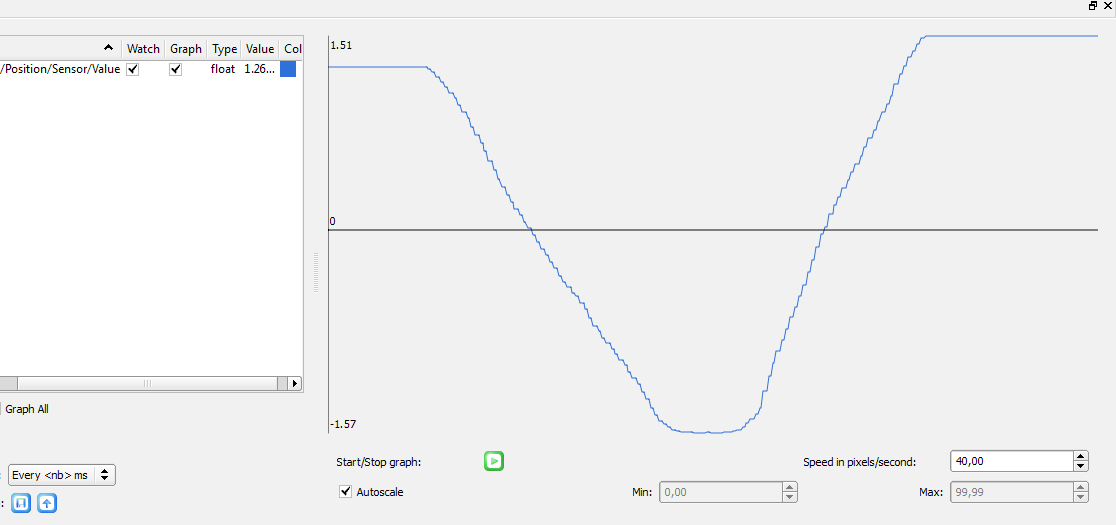
Choisir la visualisation du capteur de position de l'épaule LeftShoulderPitch :
Une fenêtre s'ouvre. Mettre la Vitesse en pixels/secondes à 40,00.
Lancer sous Choregraphe le comportement de la OLA, visualiser l'acquisition du capteur
sous Monitor. On obtient une courbe comme celle ci :
Dans Choregraphe, désactiver la commande des moteurs en cliquant sur l'icône , jusqu'à ce qu'elle devienne rouge.
Soulever le bras entre la position min. et max. et constater la variation de la position du capteur.
Question 2.3 -
Quelles sont les valeurs min. et max. de ces capteurs que
Monitor
restitue ? Donner les valeurs lorsque le bras est à 90° et
lorsqu'il est le long du corps.
Sur Monitor, choisir la visualisation :
-
Device/SubDeviceList/LShoulderPitch/Position/Sensor/Value
(détection de la position),
-
Device/SubDeviceList/LShoulderPitch/Position/Actuator/Value
(consigne position),
-
Device/SubDeviceList/LShoulderPitch/ElectricCurent/Sensor/Value
(valeur du courant dans le moteur, image du couple).
Sauvegarder le fichier sous le nom essai.xml.
Dans Choregraphe, réactiver la commande des moteurs en cliquant sur l'icône , jusqu'à ce qu'elle devienne verte.
Lancer sous Choregraphe le comportement de la OLA, visualiser l'acquisition du capteur
sous Monitor. Appuyer sur pause à la fin du mouvement. On obtient une courbe comme celle ci :
Question 2.4 -
Insérer une capture écran de votre relevé.
Question 2.5 -
Sur
le relevé
, identifier le levé du bras et la retombée du
bras.
Question 2.6 -
Relever le courant maximum (on pourra pour cela, dans Monitor, cocher uniquement
les cases Watch et Graph du courant).
Pour la suite, utiliser la ficelle ou le bracelet à mettre autour du
poignet ainsi que les masses de 50g, 100g et 200g.
Question 2.7 -
Effectuer
trois relevés
(capture d'écran et courant maximum) en plaçant une
masse de 50g, puis 100g, puis 150g.
Ces relevés expérimentaux vous serviront pour la partie
Couple & déplacement
.
3 - Analyse
= 10
min
Question 3.1 -
A l'aide des 3 valeurs collectées aux
Question 2.6 et 2.7
, tracer sur un tableur ou papier libre la courbe du courant maximum en fonction de la masse ajoutée au
poignet (0, 50, 100 et 150g).
Question 3.2 -
Quelle est la forme de la courbe ? Déterminer par le calcul la valeur du courant maximum si on ajoute
une masse de 200g au poignet.
Question 3.3 -
Vérifier expérimentalement le résultat théorique obtenu à la
Question 3.2
.
Éteindre NAO (maintenir le bouton ventral appuyé 5s jusqu'à qu'il dise : "Noc Noc") et ranger
le robot.