Réducteur de la cheville
|
Objectifs
|
Assembler le réducteur de la cheville avec SolidWorks, simuler et vérifier ses caractéristiques.
|
|
Compétences et savoirs évalués
|
-
CO7.3 - Définir, à l'aide d'un modeleur numérique, les formes et dimensions d'une pièce d'un mécanisme à partir des contraintes fonctionnelles, de son principe de réalisation et de son matériau.
-
S3-2.1 - Transformateurs et modulateurs d'énergie associé : Adaptateurs d'énergie : réducteurs mécaniques.
-
CO8.1 - Paramétrer un logiciel de simulation mécanique pour obtenir les caractéristiques d'une loi d'entrée/sortie d'un mécanisme simple.
-
CO8.2 - Interpréter les résultats d'une simulation mécanique pour valider une solution ou modifier une pièce ou un mécanisme.
|
|
Compte rendu
|
Compte rendu informatique. Vous accorderez le plus grand soin à la présentation.
|
|

|
1h50
|
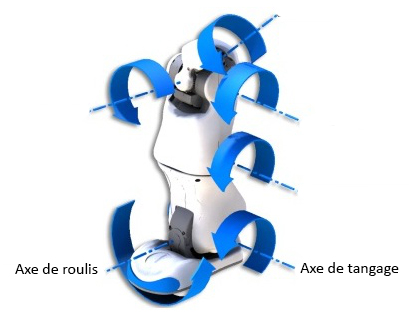
La motorisation de l'axe de tangage de la cheville du robot nao est réalisée par :
1 - Assemblage du réducteur
= 60 min
 Télécharger, dezipper et ouvrir le fichier Tibia_gauche.SLDASM.
Télécharger, dezipper et ouvrir le fichier Tibia_gauche.SLDASM.

Vous disposez en ressources des caractéristiques du réducteur avec l'icône  .
.
 Vous pouvez aussi observer le réducteur directement sue le robot.
Vous pouvez aussi observer le réducteur directement sue le robot.
En vous aidant des ressources, compléter l'assemblage de la cheville en  :
:
Pour les liaisons engrenages :
Dans les contraintes, sélectionner contraintes mécaniques puis contraintes d'engrenages  .
.
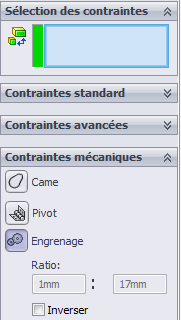
Dans la zone Sélection des contraintes, vous devez sélectionner une surface cylindrique des roues dentées qui s'engrènent.
Dans la zone Ratio, vous devez indiquer le rapport de transmission sous forme de fraction sans tenir compte des mm. Par exemple le nombre de dents de la roue menante puis le nombre de dents de la roue menée. Rechercher les caractéristiques des différentes roues dentées.
Si l'engrenage inverse le sens de rotation cocher Inverser puis valider.
A tout moment vous pouvez modifier une contrainte déjà placée, inutile de recommencer. Pour cela développer en bas de l'arborescence de gauche, la partie Contraintes.
Les contraintes sont par ordre chronologique d'ajout. Effectuer un clic droit sur la contrainte que vous souhaitez modifier, puis Editer la fonction en haut à gauche.
 Pour la suite, vous pouvez vous rafraichir la mémoire à l'aide du cours de première sur la Transmission de mouvement entre solides disponible en cliquant ici :
Pour la suite, vous pouvez vous rafraichir la mémoire à l'aide du cours de première sur la Transmission de mouvement entre solides disponible en cliquant ici :  .
.
 Question 1.1 - Copier et insérer l'image ci-dessous dans votre compte rendu. Compléter ce synoptique au fur et à mesure avec les rapports de transmission de chaque engrenages (expression littérale puis application numérique).
Question 1.1 - Copier et insérer l'image ci-dessous dans votre compte rendu. Compléter ce synoptique au fur et à mesure avec les rapports de transmission de chaque engrenages (expression littérale puis application numérique).

Réaliser l'assemblage complet de la transmission. Normalement au final en faisant tourner manuellemenet le pignon moteur 5, la cheville doit se mettre en mouvement suivant l'axe de tangage.
Question 1.2 - Déterminer le rapport de transmission global du réducteur sous forme d'une fraction 1/... .
Question 1.4 - Relever la vitesse nominale du moteur. En déduire la vitesse de rotation de la cheville N1/0 en sortie du réducteur puis la vitesse angulaire ω1/0.
 Appeler le professeur pour faire vérifier votre assemblage avant de passer à la suite.
Appeler le professeur pour faire vérifier votre assemblage avant de passer à la suite.
2 - Simulation du fonctionnement
= 40 min
Objectif - Vérifier par simulation le calcul de la Question 1.4.
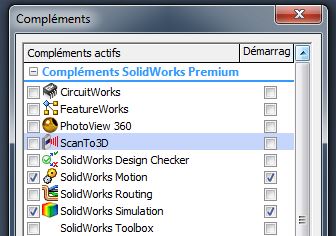
Vérifier que le module de simulation est correctement lancé. Pour cela dans le menu Outils, sélectionner Compléments et cocher SolidWorks Motion comme si dessous si ce n'est pas fait.
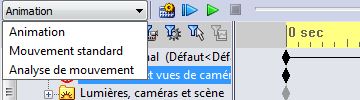
En bas de la zone de travail, sélectionner l'onglet Etude de mouvement. La partie ci-dessous doit s'ouvrir.

Dans le menu à gauche, sélectionner Analyse de mouvement.
Ajouter une motorisation au système avec  .
.
Sélectionner la surface cylindrique intérieure du pignon moteur 5.
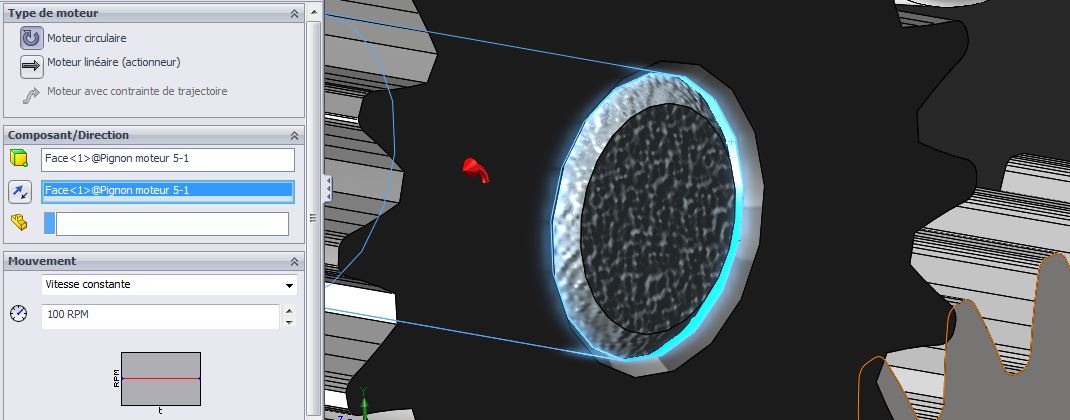
Entrer la vitesse de rotation avec la valeur relevée Question 1.4. Puis valider  .
.
Lancer le calcul du mouvement  .
.
En cas de plantage du calcul, modifier les propriétés avec  et décocher Remplacer les contraintes causant des hyperstaticités...
et décocher Remplacer les contraintes causant des hyperstaticités...
Visualiser le résultat  .
.
Sélectionner Résultats et graphes  afin d'obtenir la vitesse en sortie du réducteur puis :
afin d'obtenir la vitesse en sortie du réducteur puis :
Puis sélectionner une surface cylindrique de la roue dentée 1. Valider .
Question 2.1 - Convertir la valeur obtenue sur le graphique et la comparer avec le résultat de votre Question 1.4. Vous noterez votre raisonnement dans votre compte rendu. Est-ce en accord ?
3 - Rendu de votre travail
Appeler le professeur pour faire vérifier votre simulation.
 Enregistrer ou générer votre compte rendu en format pdf.
Enregistrer ou générer votre compte rendu en format pdf.
Renommer le fichier avec vos deux prénoms.
Copier votre fichier pdf dans le repértoire Restiution de devoirs du répertoire classe sur le réseau.