Moteurs brushless
-
4 moteurs brushless
-
35 000 tr/min
-
Puissance : 15W
Batterie Lithium polymčre

- 3 cellules
- 11,1 V
- 1000 mAh
- Temps de charge : 90 mn
La propulsion de l'AR.Drone est assurée par quatre moteurs alimentés par une batterie Lithium polymčre.
|
Moteurs brushless |
|
|
|
Batterie Lithium polymčre |
|
|
Le pilote est plongé dans le jeu ŕ réalité augmentée grâce ŕ deux caméras (frontale et verticale) dont les images sont diffusées sur l'iPhone en temps réel.
|
Caméra frontale |
|
|
|
Caméra verticale |
 |
|
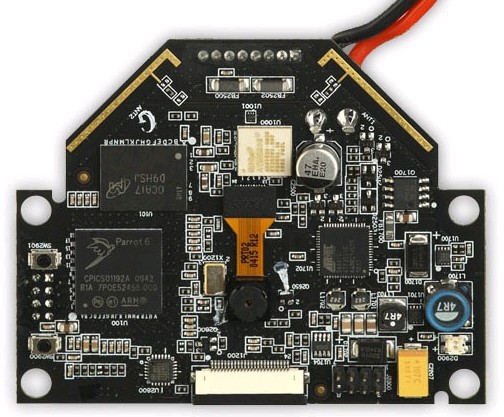
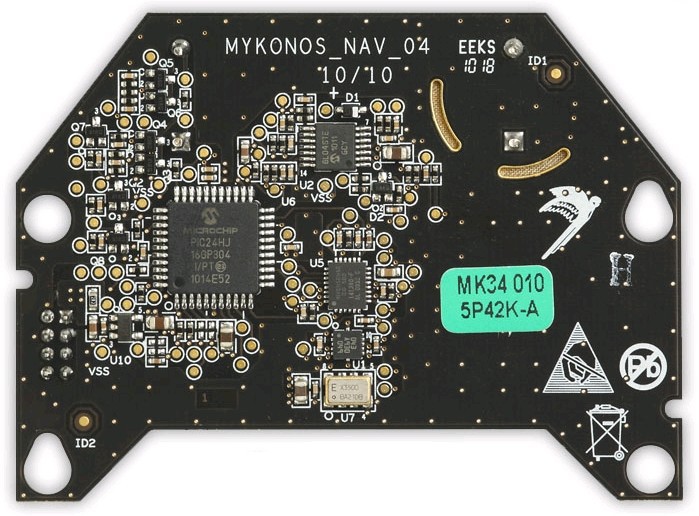
L'intelligence de l'AR.Drone est concentrée dans la carte mčre sous la forme de composants électroniques et de logiciels embarqués. La puissance de calcul de cet ordinateur embarqué, permet d'assurer des mouvement fluides et contrôlés de l'AR.Drone ainsi que la compression et la diffusion des vidéos des deux caméras.
|
Carte mčre |
|
|
|
Communications |
 |
|
|
Systčme d'exploitation |
 |
|
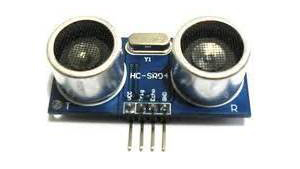
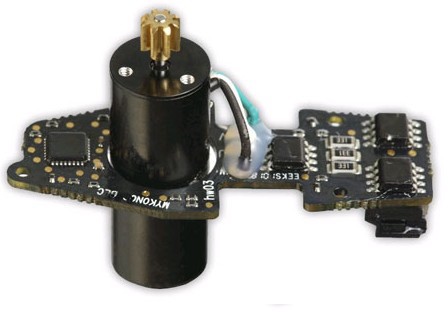
L'AR.Drone embarque un altimčtre ultrason et une centrale inertielle basée sur des accéléromčtres et des gyroscopes qui lui permet de se stabiliser (vol stationnaire) et de contrôler finement ses déplacements.
|
Altimčtre ultrason |
|
|
|
Centrale inertielle |
 |
|
L'intelligence de l'AR.Drone est concentrée dans la carte mčre sous la forme de composants électroniques et de logiciels embarqués. La puissance de calcul de cet ordinateur embarqué, permet d'assurer des mouvement fluides et contrôlés de l'AR.Drone ainsi que la compression et la diffusion des vidéos des deux caméras.
|
Sécurité |
|
|
|
Structure |
 |
|
|
Performances |
 |
|
L'AR.Drone échange en permanence des données avec le logiciel de pilotage exécuté sur l'iPhone.
|
Commandes et données de navigation |
|
|
|
Réception du flux vidéo |
 |
|
|
Configuration de l'AR.Drone |
 |
|
La société Parrot met ŕ la disposition des développeurs amateurs et professionnels la documentation, les interfaces logicielles et des exemples permettant de créer des logiciels de pilotage de l'AR.Drone.
|
API du drone |
|
|
|
Code Source d'exemples |
 |
|