La fonction de pilotage automatique du drone facilite le décollage et l’atterrissage. Aprčs le décollage, le pilote automatique stabilise le quadricoptčre ą 50 centimčtres du sol. Lorsque l’utilisateur enlčve ses doigts de l’écran de la station au sol, le pilote automatique met la drone en vol stationnaire. Le pilote automatique prend également les commandes si la connexion Wi-Fi est perdue. Il stabilise le drone avant de le faire atterrir en douceur.
Objectif : Vérifier qu'une vitesse de rotation des moteurs permet d'obtenir la stabilité verticale du drone.
Imprimer les documents réponses en recto-verso.
![]()
![]() = 60 min
= 60 min
Question 1.1 - Chercher la définition de la sustentation.
Question 1.2 - Réaliser une recherche sur les différents moyens de sustentation d’un objet. Vous donnerez des exemples pour la sustentation électromagnétique et la sustentation aérostatique.
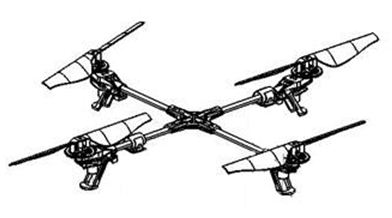
Question 1.3 - Aprčs avoir visualisé l'animation ci-dessous, représenter, sur la figure 1 du DR1, le vecteur poids « P » en bleu et le vecteur de la Portance « Rz » en rouge au centre de gravité.
![]()
Question 1.4 - Quelle relation peut-on obtenir entre « Rz » et « P » pour un vol stationnaire en négligeant tous les effets extérieurs ?
La stabilité verticale du drone peut se représenter par le modčle simplifié que vous venez de mettre en place.
Question 1.5 - A l'aide d'une balance, déterminer le poids du drone.
Question 1.6 - Indiquer sur la figure 2 du DR1 par un vecteur en bleu le poids du drone. Préciser l'échelle choisit.
Question 1.7 - Indiquer sur la mźme figure 2 par un vecteur en rouge sur chaque rotor la portance « Rz1 », « Rz2 », « Rz3 » et « Rz4 » en respectant l'échelle pour un vol stationnaire.
Question 1.8 - Compléter les phrases suivantes :
Effort de poussée
Nous allons maintenant nous attacher ą exprimer la portance ou effort de poussée des hélices comme une fonction de leur vitesse de rotation.
En effet le calage des pales, leur orientation, étant fixe le seul moyen d’influer sur la poussée des hélices consiste ą agir sur la vitesse de rotation des moteurs.
La poussée F d’une hélice est fonction du carré de la vitesse de rotation des hélices Nhélice :
Rz = F = b . Nhélice ²
Ce modčle résulte d’une application de la théorie de la ligne portance (ou théorie de Prandtl) ą chacune des pales de l’hélice. La constante b dépend de la géométrie et de l'orientation des pales. Pour le drone nous prendrons b = 3,673 x 10-7.
Question 1.9 - Fonction des éléments identifiés Question 1.7, déterminer la vitesse Nhélice pour un vol stationnaire.
Question 1.10 - A l'aide des documents en ressources, déterminer le rapport de transmission entre le moteur et l'hélice.
Question 1.11 - En déduire la vitesse de rotation Nmoteur pour un vol stationnaire.
Question 1.12 - Compléter sur le DR2 le tableau de valeur et tracer la courbe "effort de poussée F = f(Nhélice)".
Question 1.13 - Commenter l'allure de cette courbe.
![]() = 20 min
= 20 min
3.1 - Préparation du drone
Pour commencer, prendre connaissance du guide de l'utilisateur en ressources et visionner la vidéo ci-dessous.

Il est impératif de suivre le guide utilisateur « Premičre utilisation ».
Question 2.1 - Proposer une procédure sur votre compte rendu pour la mise en service et l'utilisation de l’AR Drone type « utilisation ą l’intérieur » et faire vérifier la procédure auprčs du professeur. Celle-ci doit comporter l’ensemble des étapes.
Présenter votre procédure au professeur avant de passer ą l'utilisation du drone.
3.2 - Préparation de l'iPad
Visionner les réglages nécessaires pour un pilotage via un smartphone ou une tablette.

Lancer l'application Freefight ą partir de la tablette ![]() .
.
Aprčs le lancement, accéder aux options avec ![]() et sélectionner Trim. a plat.
et sélectionner Trim. a plat.
Question 2.2 - Selon le guide de l’utilisateur ą quoi sert l’icōne Trim. a plat dans le menu de réglage de l’application ?
Question 2.3 - A l'aide du dossier technique, représenter sur la figure 1 du DR2 par des flčches les mouvements caractéristiques autour des axes de rotation ainsi que leurs noms.
3.3 - Manipulation
Visionner la vidéo suivante avant de faire voler le drone.

Faites voler le drone en tenant compte des rčgles de sécurité.
Pendant ce vol, observez les mouvements et les déplacements du drone et le sens de rotation des hélices.
![]() = 30 min
= 30 min
A l'aide de vos observations pendant la manipulation, vous allez compléter le modčle associé aux actions mécaniques.
Question 3.1 - Compléter la figure 1 sur le DR3 en indiquant les sens de rotation des 4 hélices et la valeur de Nh en tr/min pour un vol stationnaire.
Question 3.2 - Compléter les figures 1 et 2 en traēant la force de poussée de chaque hélice Fh1, Fh2 , Fh3 , Fh4 puis au centre de gravité l'effort Ftotale en tenant compte de l'échelle de tracé du poids.
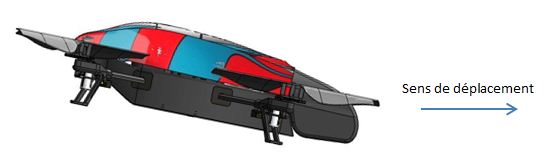
Vous allez adapter le modčle précédent ą une autre situation de pilotage. Proposer une modélisation correspondant ą la configuration oł on fait avancer le drone en ligne droite horizontale.
Question 3.3 - Compléter la figure 3 en indiquant les sens de rotation des 4 hélices et la valeur de Nh en tr/min.
Question 3.4 - Compléter les figures 3 et 4 en traēant la force de poussée de chaque hélice Fh1, Fh2 , Fh3 , Fh4 puis au centre de gravité l'effort Ftotale en tenant compte de l'échelle de tracé du poids.