Travelling pour smartphone
Au cinťma, le travelling est un dťplacement de la camťra au cours de la prise de vues cinťmatographique, pour suivre un sujet en mouvement, pour s'en rapprocher ou s'en ťloigner, ou pour le contourner et le voir sous un nouvel angle.
Pour rťaliser cette prise de vue, on installe la camťra sur un chariot que poussent les machinistes soit sur des rails soit sur des pneumatiques. Pour des longueurs plus importantes, la camťra peut Ítre installťe sur un vťhicule.


Avec le dťveloppement des applications smartphones permettant de se filmer et de se mettre en scŤne, une sociťtť souhaite proposer ŗ ses clients la mÍme technique du travelling avec un produit innovant.
Par groupe de 2 ou 3 ťlŤves, vous Ítes chargťs de proposer un prototype de travelling pour smartphone.
Le dispositif doit permettre de fixer le smartphone, de l'orienter et d'effectuer un dťplacement sur une longueur d'un mŤtre minimum en le posant sur un support plat.
Le cahier des charges
- Les piŤces seront rťalisťes par moulage plastique ŗ l'exception des piŤces standards (vis, roue dentťe, ...).
- Dans un soucis ťconomique, ťcologique et de compťtitivitť, la quantitť de matiŤre utilisťe sera limitťe.
- Le smartphone doit pouvoir Ítre orientable autour des axes horizontaux et verticaux.
- Des boutons doivent Ítre mis en place pour dťmarrer dans les deux sens le dťplacement du smartphone, faire varier la vitesse et l'arrÍter.
- Le dťplacement du smartphone doit s'effectuer sur une longueur minimale de 1 mŤtre.
- La vitesse de dťplacemetn du smartphone doit pouvoir varier entre 0,1 m/s et 0,2 m/s.
- Afin de sťduire le consomateur, le prototype doit Ítre simple d'utilisation avec un design attrayant.
- Le mouvement d'origine sera un mouvement de rotation obtenu par un moteur donnť.
Fonction supplťmentaire pour les groupes de 3 ťlŤves :
- Des capteurs doivent Ítre mise en place pour arrÍter automatiquement le dťplacement du smartphone lorsqu'il arrive aux extrťmitťs.
- Le dťplacement du smartphone pourra se contrŰler ŗ partir d'une tťlťcommande.
Les ťlťments fournis
La sociťtť vous fournit des ťlťments standards ŗ utiliser obligatoirement.

|
Le boitier piles

|
Le moteur ŗ courant continu
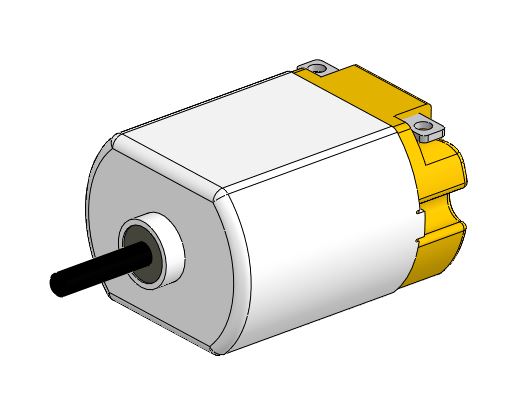
Caratťristiques :
 
|
Le carte raspberry
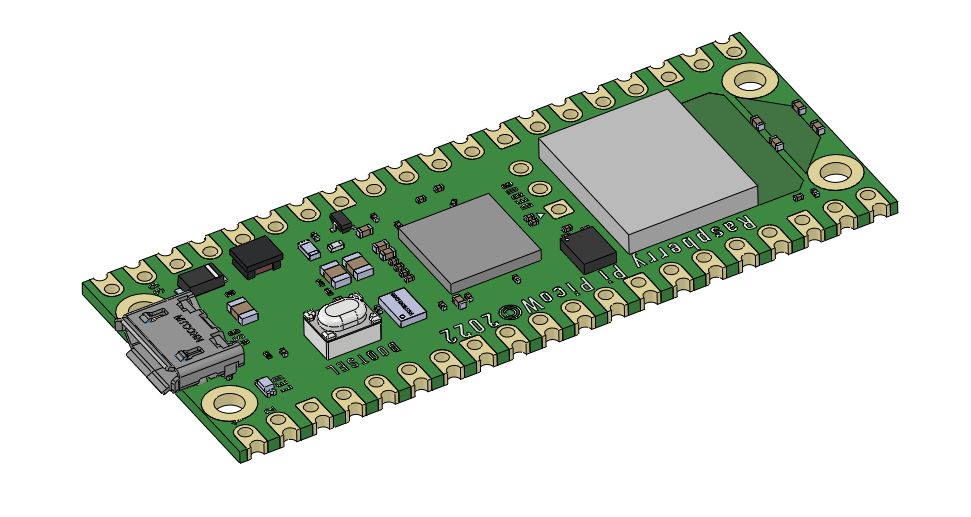
|
Le support smartphone
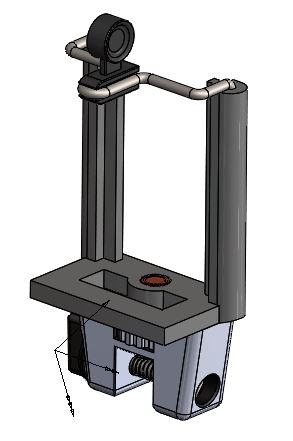
|
Les t‚ches ŗ rťaliser
Vous disposez de 3 semaines (27 heures) pour rťaliser les diffťrentes phases.
Phase 1 - Recherche d'idťes
Commencer par prendre connaissance des pages La gestion de projet et Le brainstorming.
Avant la phase de conception individuelle, vous prendrez le temps de mener une phase de recherche d'idťes ŗ l'aide du brainstorming et de croquis pour expliquer vos idťes pour chaque t‚che.
Phase 2 - Conception
La conception du prototype sera individuelle sur SolidWorks. Elle se dťcompose en 3 parties (ou 4 parties) qui seront ŗ rťpartir dans le groupe :
- Le guidage en translation (par rail, par roues ou autres ...),
- La transmission du mouvement entre le moteur donnť et le guidage en translation choisi (engrenages, crťmaillŤre, courroie),
- Le boitier intťgrant le boitier piles, le moteur, la carte de contrŰle raspberry et le support de smartphone donnťs. En plus il devra faire le lien avec les deux autres t‚ches ainsi que les boutons de commande. Le boitier rťalisera la MAP des diffťrents ťlťments ŗ l'intťrieur. Il faudra penser ŗ un accŤs facile pour le changement des pliles.
- Uniquement pour les groupes de 3 ťlŤves : Le design de la tťlťcommande et la mise en place des capteurs de fin de course.
Votre conception doit Ítre rťaliste, pensez toujours au montage/dťmontage possible des ťlťments.
Phase 3 - Calculs
- A partir de la plage de vitesse dťfinie dans le cahier des charges et en fonction de votre systŤme, calculer la plage de vitesse de rotation du moteur en tr/min.
- A partir des caractťristiques du moteur, vťrifier la compatibilitť de cette plage de vitesse.
- Dťterminer la plage de puissance du moteur et calculer la plage de tension d'alimentation en volts.
Phase 4 - Assemblage et animation
Mise en commun du travail de conception :
- Assemblage du prototype sur SolidWorks.
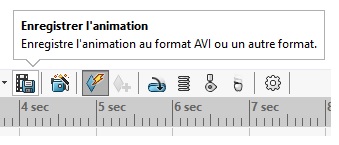
- Dans l'onglet Etude de mouvement, gťnťrer une vidťo de l'animation du fonctionnement afin de prťsenter votre solution.
- Vťrification par simulation SolidWorks de la vitesse calculťe ŗ la phase prťcťdente. Pour cette simulation vous pourrez vous reporter ŗ l'activitť sur le robot NAO - Rťducteur de la cheville.
Phase 5 - Compte rendu
Prťparation d'un diaporama en vue d'une prťsentation orale.
Le diaporama doit comprendre :
- Les croquis et les diffťrentes idťes issues de votre brainstorming (mÍme les idťes abandonnťes).
- La conception des 3 t‚ches dťtaillant les choix faits.
- L'assemblage avec des vues en 3D permettant de mettre en avant le fonctionnement du systŤme.
- La prťsentation du type de capteur utilisť et leur fonctionnement.
- La prťsentation des calculs de la phase 3.
- La vidťo rťalisťe sur SolidWorks.
- Les rťsultats de la simulation SolidWorks validant votre calcul de la vitesse.
- Des arguments mettant en avant votre prototype.
Rendu du travail
Avant les prťsentations orales, chaque groupe devra rendre deux fichiers :
Le diaporama au format pdf.
 L'assemblage solidWorks au format edrawings. Pour gťnťrer ce fichier, sur SolidWorks dans le menu Fichier, Enregistrer sous puis sťlectionner dans le type de fichier eDrawings (*.easm).
L'assemblage solidWorks au format edrawings. Pour gťnťrer ce fichier, sur SolidWorks dans le menu Fichier, Enregistrer sous puis sťlectionner dans le type de fichier eDrawings (*.easm).
Evaluation du travail
Votre projet sera ťvaluť ŗ partir de la prťsentation orale. L'ensemble des ťtapes doivent donc y Ítre prťsentťes.
De plus, votre solution sera notťe de 1 ŗ 5 ťtoiles  pour les points suivants :
pour les points suivants :
- Stabilitť,
- Facilitť d'assemblage et rťalisme,
- Facilitť de changement des piles,
- Design et esthťtisme,
- Ergonomie,
- Originalitť.